
1 Pendahuluan
Penentuan posisi menggunakan Global Navigation Satellite System (GNSS) yang sering digunakan untuk memperoleh hasiL hasil yang teliti adalah metode relatif. Berdasarkan Badan Standar Nasional Indonesia mengenai Jaring Kontrol Horizontal tahun 2002 (BSN, 2002), pengamatan menggunakan GPS yang dijadikan standar dalam pengadaan titik kontrol horizontal adalah menggunakan metode relatif. Penentuan posisi dengan metode relatif sangat bergantung pada titik referensi yang digunakan. Metode relatif menjadi populer karena dapat menghilangkan kesalahan umum pengamatan pada baseline pendek namun dampaknya berkurang pada baseline panjang (Witchayangkoon, 2000). Hal tersebut menyebabkan metode relatif kurang efektif pada kondisi lapangan tertentu, sehingga dibutuhkan metode penentuan posisi yang tidak bergantung pada titik referensi.
Metode Precise Point Positioning merupakan pengembangan dari metode absolut di mana metode tersebut tidak bergantung pada titik referensi. Dalam penentuan posisi teliti berbasis GNSS, metode ini merupakan metode yang memerlukan biaya survei yang rendah (Huber dkk. 2010) dibandingkan dengan metode relatif yang membutuhkan dua receiver. Menurut Witchayangkoon
| Received, Revised, Accepted for publication |
(2000), PPP menggunakan data orbit dan data jam satelit akurat yang disediakan oleh International GNSS Services (IGS). PPP juga memerlukan data koreksi kesalahan ionosfer dan troposfer dari IGS. Hal tersebut dikarenakan pada metode PPP untuk memperoleh hasil yang teliti perlu memodelkan seluruh kesalahan dalam pengamatan. Metode PPP dan relatif memiliki kelebihan dan kekurangannya masing-masing (Tabel 1)
Tabel 1 Kelebihan dan kekurangan antara metode PPP dan relatif [Geng dan Bock, 2013]
| Metode | Kelebihan | Kekurangan |
|---|---|---|
| Relatif | Kesalahan umum pengamatan dapat dieliminasi dengan double-difference Solusi ambiguitas fase fix (integer ambiguity) | Bergantung pada titik referensi Ketelitian bergantung panjang baseline Terbatasnya ketersediaan titik referensi |
| PPP | Hanya menggunakan satu receiver Efisiensi biaya survei Menggunakan data teliti dari IGS | Solusi ambiguitas fase masih float Perlu semua memodelkan kesalahan pengamatan |
Tingkat akurasi posisi tertinggi metode PPP berada pada skala sentimeter untuk pengamatan statik dan desimeter untuk pengamatan kinematik (Kalita dkk, 2014). Pada metode relatif dengan menggunakan baseline pendek, tingkat akurasi posisi tertinggi yang diperoleh berada pada skala milimeter. Perbedaan ketelitian serta kelebihan dan kekurangan dari kedua metode tersebut yang menjadi alasan kajian ini dilakukan. Penelitian ini bertujuan untuk mengetahui durasi pengamatan dan data teliti (precise product) yang digunakan metode PPP untuk memperoleh posisi dengan ketelitian yang mendekati metode relatif.
2 Metodologi
2.1 Metode Penelitian
Proses penelitian ini dimulai dari pengamatan GNSS yang terbagi menjadi dua metode yaitu metode PPP dan relatif. Data hasil pengamatan kemudian diolah dengan masing-masing metode untuk memperoleh hasil koordinat beserta ketelitiannya. Ketelitian posisi ditinjau berdasarkan nilai strandar deviasi yang
Ketelitian Posisi Menggunakan Metode Precise Point Positioning (PPP) Pada Pengamatan GNSS 3
dihasilkan. Terdapat tiga tahapan yang dilakukan sesuai dengan metode penelitian, yaitu:
- 1. Tahap pengambilan data, di mana data yang diperoleh dari pengamatan GNSS dengan moda statik. Pengamatan dilakukan pada dua buah titik dengan jarak titik kira-kira 8.5 km yang masuk ke dalam kategori baseline pendek.
- 2. Tahap pengolahan data, di mana pengolahan data dilakukan pada perangkat lunak medium precision. Masing-masing metode diolah pada perangkat lunak yang berbeda. Pengolahan dilakukan secara post processing. Pengolahan data dilakukan dengan beberapa strategi untuk melihat hasil yang representative.
- 3. Tahap analisis dan penyajian, di mana pada tahap ini akan dilakukan analisis komparatif pada standar deviasi horizontal dan vertikal hasil dari pengolahan kedua metode.
Ketiga tahapan tersebut secara diagram ditunjukkan oleh Gambar 1.
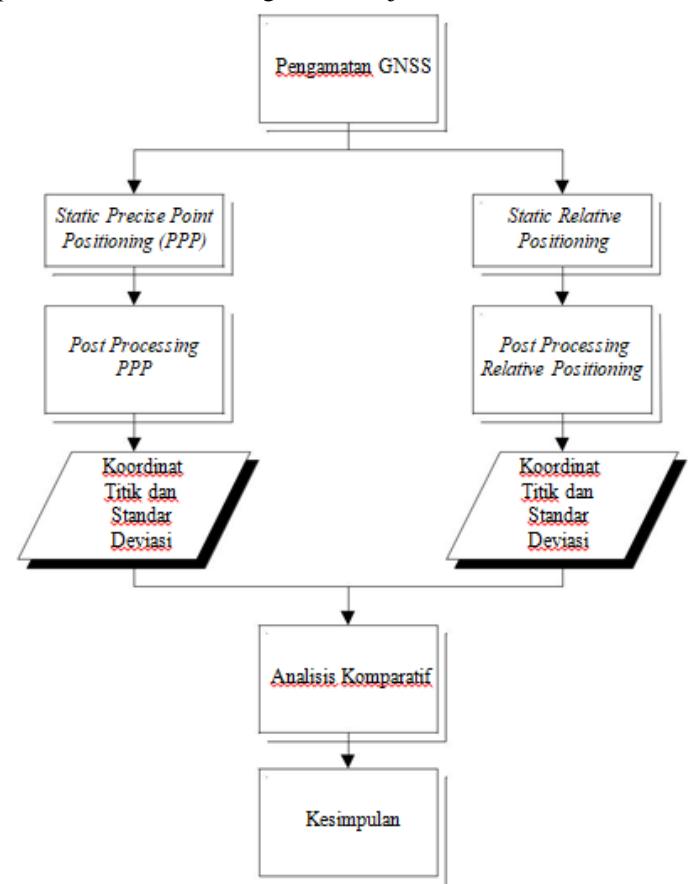
Gambar 1 Diagram alir metode penelitian.
2.2 Data dan Tempat Pelaksanaan
Data pengamatan GNSS yang digunakan dalam penelitian ini adalah perekaman dari Continously Operating Reference Station (CORS) pada titik CLBG di Lembang dan titik ITN1 di Kampus Itenas. Jarak antara titik CLBG dan ITN1 kurang lebih 8.5 km. Lokasi titik pengamatan dapat dilihat pada Gambar 2.
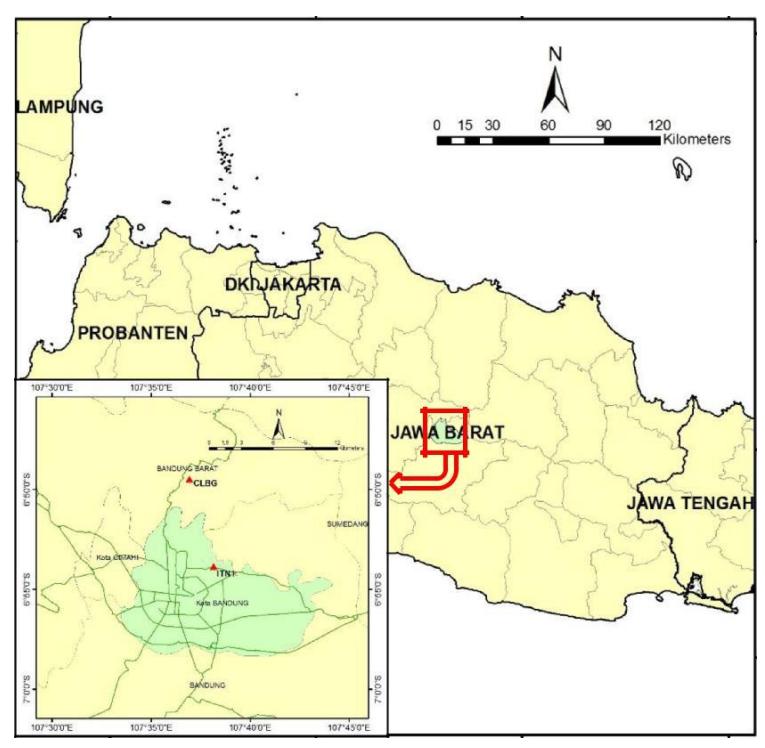
Gambar 2 Lokasi titik pengamatan GNSS.
Data yang digunakan adalah data pengamatan selama 24 jam. Masing-masing stasiun memiliki spesifikasi teknis yang dijelaskan pada Tabel 2. Jumlah satelit yang diamati dan nilai GDOP, PDOP ditunjukkan oleh Gambar 3.
Tabel 2 Spesifikasi teknis stasiun pengamat
| Nama Stasiun (code) | CLBG | ITN1 |
|---|---|---|
| Lokasi | Bosch-Lembang, Bandung | Gedung 18 Itenas, Bandung |
| Lintang | 6° 49' 27.97863" S | 6° 53' 51.06" S |
| Bujur | 107° 36' 56.16" E | 107° 38' 9.32" E |
| Tinggi di atas elipsoid | 1329.737 m | 742.212 m |
| Tipe Receiver | Leica GRX1200GGPRO | Hi Target VNet6 |
| Tipe Antena | LEIAT504GG | HITAT35101CR |
| Tinggi Antena | 0.008 m | 1.428 m |
| Mask Angle | 10° | 10° |
| Interval Pengamatan | 30 Detik | 30 Detik |
| GPS Week | 19750 dan 19751 | 19750 dan 19751 |
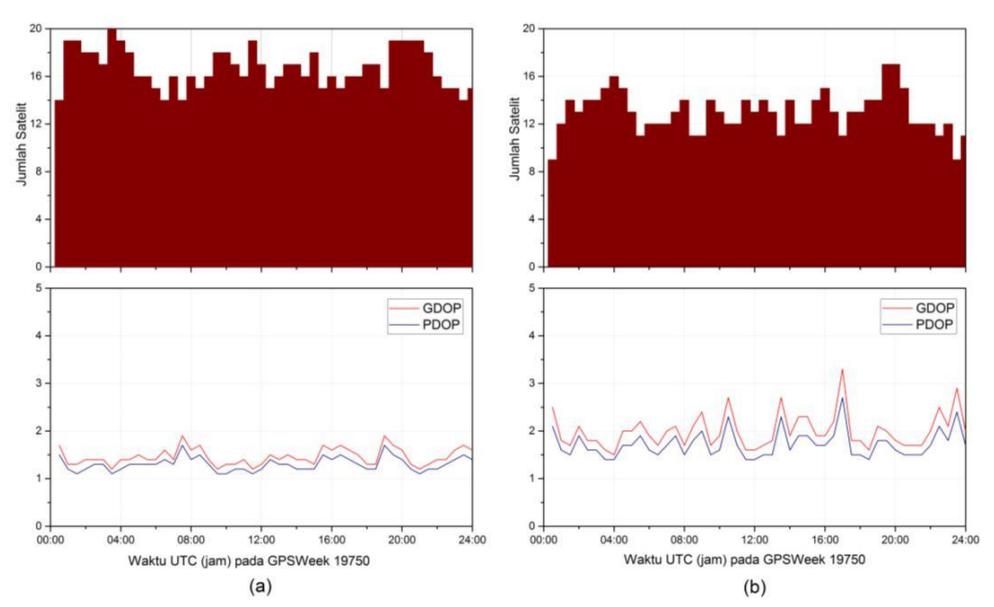
Gambar 3 Jumlah satelit, GDOP dan PDOP pada titik ITN1 (a) dan titik CLBG (b).
Dapat diperhatikan pada Gambar 2 bahwa, pada titik ITN1 memperoleh jumlah satelit yang lebih banyak dari titik CLBG. Hal tersebut juga berdampak pada nilai geometrical dilution of precision (GDOP) dan positional dilution of precision (PDOP), di mana pada titik ITN1 memiliki nilai GDOP terendah 1.2 dan nilai tertinggi 1.9 sedangkan pada titik CLBG nilai GDOP terendah 1.5 dan nilai tertinggi 3.3 sehingga menunjukkan bahwa pengamatan pada titik ITN1 memiliki geometrik satelit yang lebih baik daripada titik CLBG. Kedua titik masih dalam kondisi yang ideal di mana nilai GDOP rata-rata lebih kecil dari lima (Abidin, 2011).
2.3 Pengolahan Data
Berdasarkan metode penelitian yang digunakan, pengolahan data dilakukan pada dua titik yang ditentukan sebagai base dan rover. Pengolahan dilakukan dengan metode PPP dan relatif dengan strategi pengolahan sebagai berikut:
No. Master (Base) Rover 1. PPP PPP
2. Titik Referensi (known) Relatif
Tabel 3 Strategi pengolahan data
Berdasarkan strategi pengolahan data pada Tabel 3 akan diperoleh hasil koordinat dan standar deviasi dari masing-masing metode yang dilakukan. Pengolahan dilakukan pada perangkat lunak medium precision, yaitu CSRS-PPP (online) untuk post processing PPP dan Trimble Business Center untuk post processing baseline. Selain itu, dilakukan penentuan selisih koordinat yang dihasilkan, seperti contoh selisih koordinat hasil pengolahan menggunakan PPP terhadap koordinat yang diketahui (known point) pada base juga selisih koordinat antara PPP dan relatif pada rover. Ketelitian dilhat dalam sistem koordinat toposentrik East, North dan Up.
3 Analisis Hasil
Hasil dari pengolahan data dengan metode PPP dan relatif berupa koordinat yang kemudian ditentukan selisihnya dari kedua metode untuk melihat seberapa jauh metode PPP dapat mendekati metode relatif. Selain itu, dilihat selisih antara metode PPP dengan titik yang diketahui (known point) untuk melihat seberapa jauh koordinat hasil metode PPP dapat mendekati titik yang memiliki orde. Selisih koordinat antara metode PPP dan known point dapat dilihat dari pengamatan pada titik CLBG. Pada titik tersebut juga dilihat selisih hasil
Ketelitian Posisi Menggunakan Metode Precise Point Positioning (PPP) Pada Pengamatan GNSS 7
pengolahan metode PPP menggunakan data ephemeris IGS Final dan NRCan Rapid. Dari Gambar 4 dapat dilihat bahwa koordinat hasil pengolahan metode PPP dengan menggunakan data ephemeris tertentu memiliki perbedaan yang tidak begitu jauh ditunjukkan dengan selisih koordinat berkisar pada skala sentimeter.
Gambar 4 Selisih koordinat IGS Final dan NRCan Rapid terhadap known point.
Gambar 4 memperlihatkan bahwa koordinat hasil pengolahan menggunakan metode PPP mendekati koordinat sebenarnya dengan nilai rata-rata horizontal 0.026 m untuk IGS Final dan 0.028 m untuk NRCan Rapid. Untuk selisih koordinat vertikal masih terdapat pada skala desimeter dengan nilai rata-rata 0.125 m dan 0.129 m.
Penentuan selisih koordinat hasil metode PPP dan relatif dilakukan pada titik ITN1 sebagai rover. Pada pengolahan metode relatif, titik yang dijadikan base adalah titik CLBG dengan koordinat yang telah diketahui. Selisih koordinat dilakukan pada sistem koordinat toposentrik ENU.
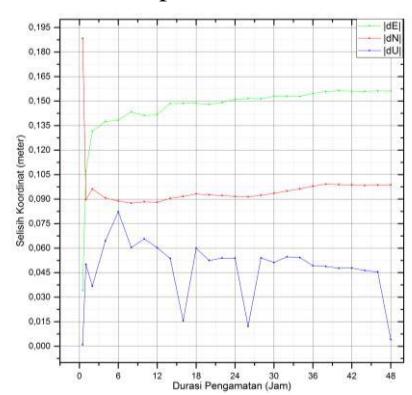
Gambar 5 Selisih koordinat antara PPP dan relatif.
Sesuai Gambar 5 koordinat horizontal hasil pengolahan metode PPP mendekati koordinat hasil pengolahan metode relatif dengan rata-rata horizontal 0.120 m. Koordinat North metode PPP lebih mendekati metode relatif dengan rata-rata selisih 0.097 m dibandingkan East dengan rata-rata selisih 0.143 m. Untuk selisih ketinggian (Up) antara metode PPP dan relatif menunjukan nilai yang lebih kecil dibandingkan dengan posisi horizontalnya dengan rata-rata selisih ketinggian 0.047 m. Hal tersebut tidak berarti ketinggian hasil dari PPP dapat mendekati metode relatif, melainkan dapat disebabkan karena ketinggian hasil dari kedua metode sama sama tidak teliti sehingga menunjukkan selisih yang kecil.
Ketelitian posisi dari kedua metode ditinjau dari nilai standar deviasi. Perbandingan ketelitian antara penggunaan data precise ephemeris IGS Final dan NRCan Rapid dalam metode PPP dilakukan pada titik CLBG. Standar deviasi posisi dalam sistem koordinat toposentrik ENU ditunjukkan pada gambar berikut.
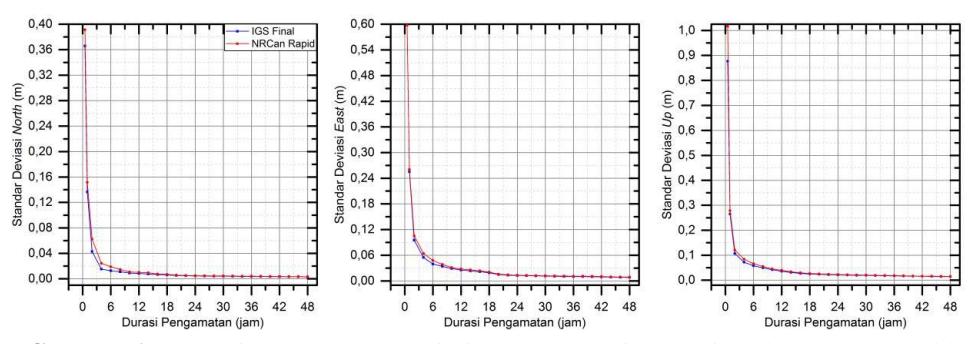
Gambar 6 Perbandingan Standar Deviasi data ephemeris IGS Final dan NRCan Rapid.
Gambar 6 menunjukkan bahwa penggunaan data ephemeris IGS Final lebih teliti pada durasi pengamatan 0.5 jam sampai 8 jam. Nilai standar deviasi posisi antara penggunaan IGS Final dan NRCan Rapid stabil dalam skala sentimeter sampai dengan milimeter mulai dari durasi pengamatan 12 jam. Ketelitian antara penggunaan data ephemeris IGS Final dan NRCan Rapid tidak menunjukkan adanya perbedaan yang signifikan di mana perbedaan standar deviasi paling tinggi berkisar pada skala 0.020 m dan paling rendah pada skala 0.001 m.
Perbandingan ketelitian dilihat dari standar deviasi posisi antara metode PPP dan relatif dilakukan pada titik ITN1 sebagai rover. Penentuan posisi titik ITN1 relatif terhadap titik base CLBG pada metode relatif. Grafik perbandingan standar deviasi antara metode PPP dan relatif ditunjukkan oleh Gambar 7.
Ketelitian Posisi Menggunakan Metode Precise Point Positioning (PPP) Pada Pengamatan GNSS 9
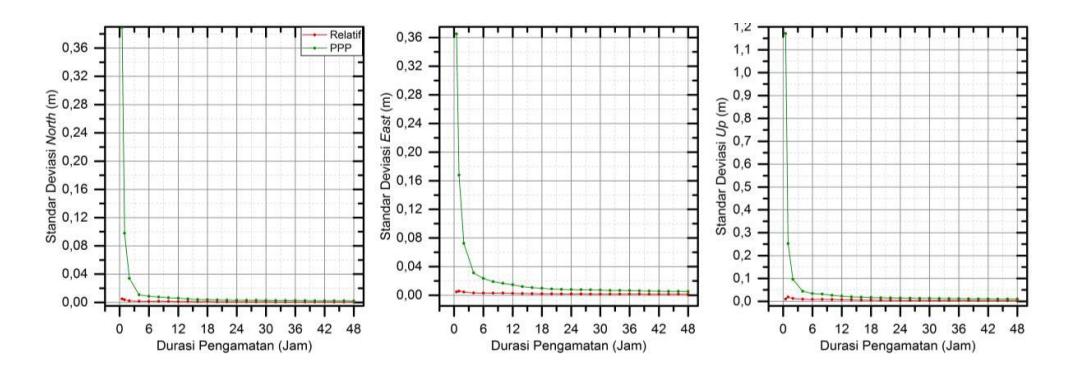
Gambar 7 Perbandingan standar deviasi antara metode PPP dan relatif.
Gambar 7 menunjukkan bahwa standar deviasi dari metode relatif lebih stabil dibandingkan dengan metode PPP baik itu East, North maupun Up. Pada metode PPP standar deviasi masih berada di skala desimeter pada lama pengamatan 0.5 jam sampai dengan 2 jam. Pengamatan menggunakan metode PPP mulai stabil pada pengamatan selama 6 jam dengan standar deviasi pada skala sentimeter. Pada durasi pengamatan 6 jam sampai dengan 48 jam, metode PPP sangat mendekati ketelitian dari metode relatif dilihat dari stabilnya nilai standar deviasi dan garis yang hampir menyinggung pada Gambar 7.
4 Kesimpulan
Berdasarkan analisis hasil dari pengamatan menggunakan metode PPP dan relatif, maka dapat disimpulkan bahwa koordinat hasil pengolahan metode PPP menggunakan perangkat lunak CSRS-PPP dapat mendekati koordinat hasil metode relatif dengan rata-rata selisih horizontal sebesar 0.120 m dan selisih rata-rata ketinggian sebesar 0.047 m. Dilihat dari nilai standar deviasinya, metode PPP dapat mendekati metode relatif dengan minimal pengamatan selama 6 jam. Pada pengolahan metode PPP data precise ephemeris IGS Final sedikit lebih teliti dibandingkan dengan NRCan Rapid dengan perbedaan standar deviasi sekitar 0.001 m.
5 Daftar Pustaka
Abidin, H. Z., J. Andrew dan J. Kahar (2011). Survei dengan GPS, Institut Teknologi Bandung, ISBN 978-602-9056-01-3.
Huber, K., Heuberger, F., Abart, C., Karabatic, A., Weber, R., Berglez, P. 2010. ppp: Precise Point Positioning – Constraints and Opportunities. FIG Congress 2010.
- Kalita, J., Z. Rzepecka, dan I. Szuman-Kalita (2014). The Application of Precise Point Positioning in Geosciences, eISSN 2029-7092 / eISBN 978- 609-457-640-9 diambil dari: http://enviro.vgtu.lt
- Witchayangkoon, B. (2000). Elements Of GPS Precise Point Positioning, PhD disertation, University of Maine, Orono, Maine. Diambi dari: www.spatial.maine.edu/SIEWEB/thesesdissert.html