
1 Pendahuluan
Seiring dengan kemajuan teknologi pemetaan, teknologi LiDAR semakin berkembang pula. Saat ini LiDAR tidak hanya ditempatkan di wahana pesawat berpenumpang, namun telah menggunakan pesawat tanpa awak atau Unmanned Aerial Vehicle (UAV). Teknologi LiDAR menggunakan UAV ini dapat dijadikan sebagai alternatif untuk pemetaan dengan luasan area yang tidak terlalu luas dan kurang efektif jika dilakukan dengan menggunakan survei terestris maupun pengukuran dengan LiDAR yang menggunakan wahana pesawat.
| Received, Revised, Accepted for publication |
Teknologi LiDAR menggunakan wahana UAV, apabila dilihat dari segi biaya dan waktu yang dibutuhkan, mampu mengungguli teknologi LiDAR yang menggunakan wahana pesawat. Hal ini dikarenakan dalam menerbangkan UAV tidak memerlukan proses perizinan yang sulit. Selain itu, UAV pun tidak memerlukan sarana landasan dan jenis bahan bakar khusus pesawat. Begitu pula dengan keamanan surveyor dalam menggunakan wahana UAV ini lebih terjaga karena sedikitnya interaksi surveyor dengan objek yang diukur, serta tidak adanya resiko kecelakan pesawat yang berdampak pada keselamatan surveyor.
Melihat banyaknya kendala yang diberikan oleh LiDAR dengan wahana pesawat yang mampu diatasi oleh LiDAR dengan wahana UAV, membuat LiDAR dengan UAV ini semakin banyak diminati oleh masyarakat. Namun sebagai teknologi yang baru, pemanfaatan dan ketelitian yang dihasilkan oleh LiDAR dengan UAV ini belum banyak diketahui. Pada penelitian ini dilakukan analisis visual terkait hasil akuisisi LiDAR dengan UAV terhadap beberapa objek diantaranya bangunan, jalan, sungai, area terbuka, dan area vegetasi, yang terdapat pada lokasi penelitian yang berada di Kecamatan Grogol, Kabupaten Kediri, Jawa Timur. Analisis pun dilakukan terhadap ketelitian hasil dari akuisisi LiDAR dengan UAV apabila dibandingkan dengan hasil dari akuisisi LiDAR dengan pesawat. Diharapkan penelitian ini mampu memberikan gambaran mengenai pemanfaatan dan ketelitian wahana UAV apabila dibandingkan dengan wahana pesawat terbang.
2 Metodologi
Pelaksanaan penelitian terkonsentrasi pada perbandingan hasil pengolahan antara dua data, yaitu data LiDAR dengan wahana UAV dan data LiDAR dengan wahana pesawat. Metodologi penelitian ditunjukkan pada Gambar 1.
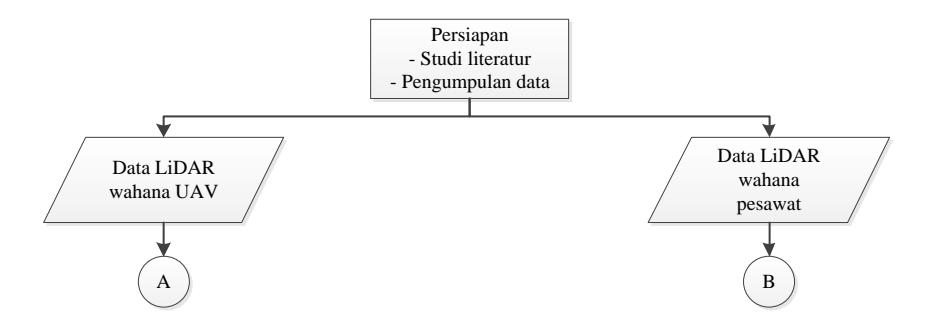
Gambar 1. Metodologi Penelitian
3 Pembahasan
3.1 LiDAR (Light Imaging Detection and Ranging)
Menurut Soetaat (2009), LiDAR merupakan sistem penginderaan jauh aktif menggunakan sinar laser yang dapat menghasilkan informasi mengenai karakteristik topografi permukaan tanah dalam posisi horizontal dan vertikal. Sinar laser tersebut dapat menembus celah dedaunan untuk mencapai permukaan tanah dan dipantulkan kembali untuk ditangkap oleh sensor laser [1].
Pernyataan serupa juga dijelaskan oleh Sutanta (2002), bahwa LiDAR merupakan suatu metode pemetaan dengan teknologi baru yang menggunakan
sensor laser pada pesawat udara [2]. Teknologi baru mempunyai makna bahwa sensor lasernya diletakkan pada wahana yang bergerak. Sebelumnya laser digunakan untuk pengukuran dengan objek dan sensor yang diam. Pada saat akuisisi data, sensor laser memancarkan sinar laser dari wahana terbang ke arah permukaan bumi dengan sudut pancaran tertentu. Apabila posisi wahana terbang dapat diketahui melalui pengamatan GPS (Global Positioning System) dan IMU (Inertial Measurement Units), serta jarak antara wahana terbang dengan permukaan bumi diketahui melalui sensor LiDAR, maka titik-titik di permukaan bumi akan dapat diketahui posisinya. Ilustrasi akuisisi data LiDAR ditunjukkan pada Gambar 2 [3].
Gambar 2. Ilustrasi Akuisisi Data LiDAR (Zuriabangkit, 2013)
3.2 Klasifikasi Data LiDAR
Raw data hasil akuisisi LiDAR akan berupa point clouds yang belum terklasifikasi. Data hasil pantulan dari semua objek akan tercampur menjadi satu sehingga sulit dibedakan. Maka dari itu perlu dilakukan pemisahan data point clouds atau biasa disebut point classification [4].
Proses klasifikasi atau penyaringan dilakukan untuk memisahkan antara point clouds hasil pemantulan dari suatu jenis objek dengan jenis objek lainnya, maupun dengan hasil pemantulan dari permukaan tanah [5]. Pernyataan serupa juga dijelaskan oleh [6], bahwa point clouds merupakan hasil dari pengukuran LiDAR dan dapat didefinisikan menjadi dua bagian yaitu ground dan non ground feature. Untuk titik ground dapat menampilkan tanah pada suatu daerah. Titik non ground merupakan hasil dari pantulan sinar laser yang mengenai suatu objek sebelum laser sampai pada permukaan.
Menurut Kandia (2012), tahapan klasifikasi dapat dilakukan melalui dua metode klasifikasi, yaitu secara otomatis dan manual [4]. Metode otomatis dilakukan dengan memanfaatkan perangkat lunak pengolahan data LiDAR dengan menggunakan beberapa parameter yang harus ditentukan terlebih dahulu, sedangkan metode klasifikasi manual merupakan inspeksi manual yang dilakukan langsung oleh pengguna dengan bantuan ortofoto dan identifikasi tampak samping (cross section) untuk memeriksa dan memastikan bahwa seluruh point clouds telah terklasifikasi dengan baik sesuai dengan kelasnya.
Gambar 3. Klasifikasi Data
Pada penelitian ini, untuk memisahkan point ground dan point non ground, maka diperlukan klasifikasi yang terbagi menjadi 5 kelas, diantaranya non ground, low point (groups of points), low point (single point), ground, dan below surface seperti yang ditunjukkan pada Gambar 3. Kelas non ground berisikan point clouds yang merepresentasikan objek-objek selain tanah. Kelas low point berisikan point clouds yang memiliki ketinggian lebih rendah daripada titik-titik di sekitarnya, sehingga low point ini menunjukkan elevasi suatu titik berada di bawah tanah. Kelas low point dibedakan menjadi 2 yaitu low point (groups of points) dan low point (single points), yang ditunjukkan pada Gambar 4. Kelas ground berisikan point clouds yang merepresentasikan tanah dan juga objek dengan permukaan yang keras seperti jalan.
Gambar 4. (a) Kelas Low Point (Single Points); (b) Low Point (Groups of Point) (Terrasolid, 2016)
Sama halnya dengan low point, kelas below surface pun berisikan point clouds yang memiliki ketinggian lebih rendah daripada titik-titik di sekitarnya. Namun, pengklasifikasian kelas below surface ini dapat dilakukan setelah klasifikasi ground dikerjakan, sehingga pada saat penyusunan kelas, kelas below surface ini berada setelah kelas ground. Kelas below surface ini lebih digunakan untuk memastikan bahwa elevasi suatu titik berada di bawah tanah. Klasifikasi kelas below surface ditunjukkan pada Gambar 5. Apabila klasifikasi data dari ke 5 kelas tersebut telah dilakukan, maka setiap point clouds akan terpisah sesuai dengan kelasnya seperti yang ditunjukkan pada Gambar 6.
Gambar 5. Kelas Below Surface (Terrasolid, 2016)
Gambar 6. Hasil Klasifikasi Data LiDAR
3.3 Export Lattice
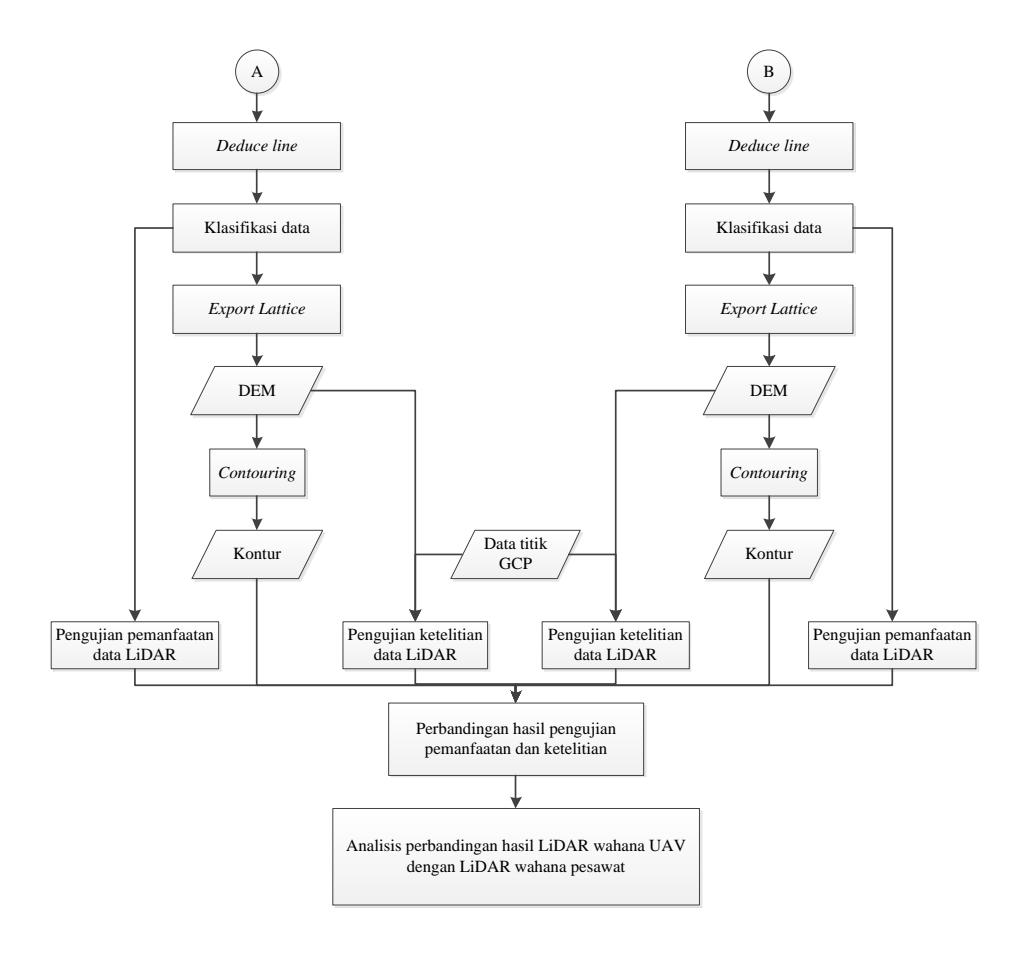
Export lattice adalah tahapan yang dilakukan sebelum pembentukan Digital Elevation Model (DEM). Tahapan ini ditujukan untuk mengolah data hasil klasifikasi. Lattice tersusun atas titik-titik dalam ruang tiga dimensi dimana setiap titik memiliki ukuran dan jarak yang sama. Untuk membentuk DEM maka digunakan macro export lattice ground, yang terbentuk dari point clouds yang telah diklasifikasikan ke dalam kelas ground. Hasil pembentukan DEM dari kedua data ditunjukkan pada Gambar 7.
Gambar 7. (a) Hasil Pembentukan DEM dari Data LiDAR Wahana Pesawat; (b) Hasil Pembentukan DEM dari Data LiDAR Wahana UAV
3.4 Hasil dan Analisis Perbandingan Ketelitian Data LiDAR
Pengujian ketelitian elevasi data LiDAR dilakukan terhadap 2 data, yaitu data LiDAR menggunakan wahana pesawat dan data LiDAR menggunakan wahana UAV. Ketelitian yang diperoleh selanjutnya dibandingkan dengan elevasi data titik GCP yang dianggap benar dan dianggap memiliki ketelitian yang lebih tinggi dibandingkan data LiDAR. Titik GCP yang digunakan yaitu sebanyak 52 titik. Pada kenyataannya, data titik-titik GCP yang digunakan sebagai pembanding tidak berada tepat pada data hasil akuisisi LiDAR, akan tetapi berada di antara data hasil akuisisi LiDAR. Oleh karena itu, untuk mendapatkan ketelitian elevasi, perangkat lunak Microstation V.8i melakukan interpolasi linier agar titik hasil akuisisi LiDAR tepat berada pada titik GCP. Ketelitian hasil akuisisi LiDAR ditentukan berdasarkan nilai RMSE (Root Mean Square Error) yang dihasilkan. Perbandingan nilai RMSE ini ditunjukkan pada Tabel 1.
Tabel 1. Perbandingan RMSE Data LiDAR dengan Wahana Pesawat dan Wahana UAV
| Data LiDAR Pesawat (m) | Data LiDAR UAV (m) | |
|---|---|---|
| Average dz | 0,114 | 0,047 |
| Minimum dz | -0,008 | -0,538 |
| Maximum dz | 0,17 | 0,16 |
| Average magnitude | 0,121 | 0,081 |
| Root mean square | 0,122 | 0,114 |
| Std deviation | 0,044 | 0,105 |
Pada penelitian yang dilakukan terhadap area seluas 100 ha dengan kondisi topografi bervariatif, yang sebagian besar merupakan lahan pertanian datar yang diapit oleh perbukitan, berdasarkan Tabel 4.3 dapat diketahui bahwa ketelitian elevasi data LiDAR menggunakan wahana UAV lebih baik daripada ketelitian elevasi data LiDAR menggunakan wahana pesawat. Hal ini ditunjukkan dengan nilai ketelitian dan RMSE data LiDAR dengan UAV lebih kecil daripada data LiDAR dengan pesawat, yaitu ketelitian elevasi mencapai 0,047 m dan nilai RMSE sebesar 0,114 m. Sedangkan data LiDAR dengan pesawat menghasilkan nilai ketelitian elevasi sebesar 0,114 m dan nilai RMSE sebesar 0,122 m. Tabel 4.3 menunjukkan nilai-nilai yang dihasilkan dari proses pengolahan data LiDAR baik menggunakan wahana UAV maupun wahana pesawat. Average dz menunjukkan nilai ketelitian elevasi yang dihasilkan, minimum dz menunjukkan nilai selisih elevasi minimum, maximum dz menunjukkan nilai selisih elevasi maksimum, average magnitude menunjukkan kekuatan atau power dari sensor, root mean square menunjukkan nilai RMSE yang dihasilkan, std deviation menunjukkan nilai standar deviasi yang dihasilkan.
Hasil ketelitian elevasi ini dapat dipengaruhi oleh beberapa faktor yang saling berhubungan, salah satunya pengaruh kerapatan titik data LiDAR. Pada penelitian ini, sensor LiDAR dengan pesawat menggunakan densitas sebesar 4 ppm (points per meter), sedangkan sensor LiDAR dengan UAV menggunakan densitas sebesar 20 ppm (points per meter). Sesuai dengan penelitian sebelumnya yang dilakukan oleh Kartika (2010), bahwa kerapatan titik bergantung pada tinggi terbang dan kecepatan wahana yang digunakan pada saat akuisisi data [7]. Semakin tinggi dan semakin cepat wahana terbang, maka kerapatan titik yang digunakan akan semakin kecil. Tinggi terbang wahana pesawat berada di ketinggian ± 800 meter, sedangkan tinggi terbang wahana UAV berada di ketinggian ± 60 meter. Tinggi terbang wahana UAV yang rendah ini disebabkan oleh keterbatasan UAV dalam membawa beban sensor
LiDAR, batasan izin terbang, dan menghindari pengaruh angin yang besar. Sesuai dengan penelitian sebelumnya yang telah dilakukan oleh Zuriabangkit (2013), bahwa semakin tinggi wahana terbang, maka kekuatan sinyal laser semakin berkurang [3]. Sementara itu, kekuatan sinyal laser akan mempengaruhi ketelitian yang dihasilkan. Kualitas data sangat ditentukan oleh besarnya persentase sinyal yang diterima kembali oleh sensor.
3.5 Hasil dan Analisis Perbandingan Pengujian Pemanfaatan Data LiDAR
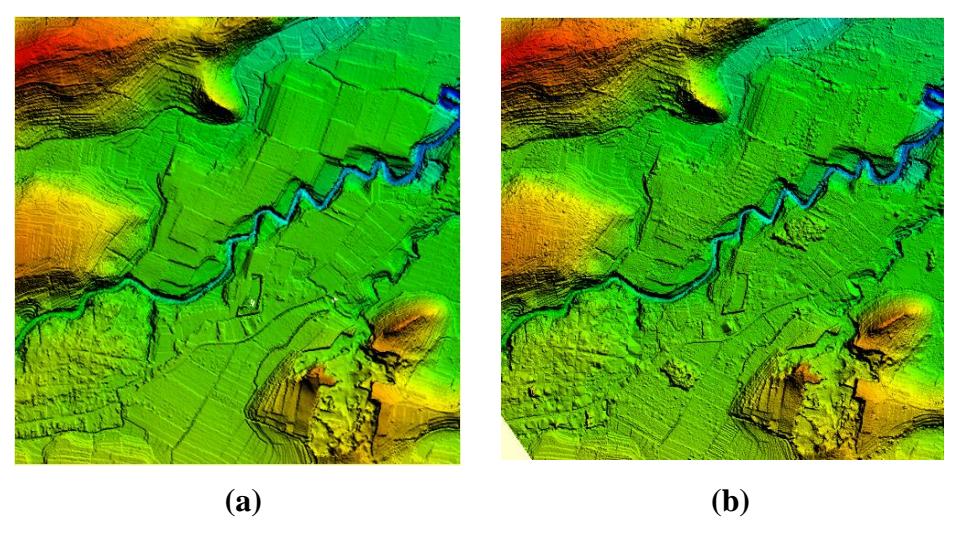
Pengujian pemanfaatan data LiDAR dilakukan terhadap 5 sampel dari objek diantaranya bangunan, jalan, sungai, area terbuka, dan area vegetasi. Pengujian dilakukan secara visual dengan melihat point clouds yang telah terklasifikasi menjadi point ground dan point non ground dari masing-masing data LiDAR. Perbandingan hasil pengujian pemanfaatan ini ditunjukkan pada Tabel 2, dengan tampilan cross section hasil perekaman yang ditunjukkan pada Gambar 8. Sedangkan untuk objek jalan ditunjukkan pada Tabel 3 dengan tampilan cross section hasil perekaman yang ditunjukkan pada Gambar 9. Untuk objek area terbuka ditunjukkan pada Tabel 4 dengan tampilan cross section hasil perekaman yang ditunjukkan pada Gambar 10.
Tabel 2. Perbandingan Hasil Pengujian Pemanfaatan Objek Bangunan
| Objek | Data LiDAR | |
|---|---|---|
| Pesawat | UAV | |
| Sampel Bangunan 1 | Terekam | Terekam |
| Sampel Bangunan 2 | Terekam | Terekam |
| Sampel Bangunan 3 | Terekam | Terekam |
| Sampel Bangunan 4 | Terekam | Terekam |
| Sampel Bangunan 5 | Terekam | Terekam |
Gambar 8. Hasil Perekaman Data LiDAR dengan Pesawat dan UAV pada Objek Bangunan
Tabel 3. Perbandingan Hasil Pengujian Pemanfaatan Objek Jalan
| Data LiDAR | ||
|---|---|---|
| Objek | Pesawat | UAV |
| Sampel Jalan 1 | Terekam | Terekam |
| Sampel Jalan 2 | Terekam | Terekam |
| Sampel Jalan 3 | Terekam | Terekam |
| Sampel Jalan 4 | Terekam | Terekam |
| Sampel Jalan 5 | Terekam | Terekam |
Gambar 9. Hasil Perekaman Data LiDAR dengan Pesawat dan UAV pada Objek Jalan
Tabel 4. Perbandingan Hasil Pengujian Pemanfaatan Objek Area Terbuka
| Objek | Data LiDAR | |
|---|---|---|
| Pesawat | UAV | |
| Sampel Area Terbuka 1 | Terekam | Terekam |
| Sampel Area Terbuka 2 | Terekam | Terekam |
| Sampel Area Terbuka 3 | Terekam | Terekam |
| Sampel Area Terbuka 4 | Terekam | Terekam |
| Sampel Area Terbuka 5 | Terekam | Terekam |
Gambar 10. Hasil Perekaman Data LiDAR dengan Pesawat dan UAV pada Objek Area Terbuka
Berdasarkan Tabel 2, Tabel 3, dan Tabel 4, seluruh sampel objek bangunan, jalan, dan area terbuka dapat terekam dengan baik oleh semua sensor LiDAR. Hal ini dapat disebabkan oleh reflektivitas suatu objek. Reflektivitas objek ini dipengaruhi oleh jenis permukaan objek, semakin keras permukaan objek maka tingkat reflektivitasnya akan semakin kuat. Semakin besar tingkat reflektivitas suatu objek, maka semakin besar kekuatan pantulan pulsa laser yang diterima oleh sensor. Reflektivitas objek tersebut akan berbeda untuk tutupan lahan yang berbeda pula. Bangunan, jalan, dan area terbuka merupakan contoh objek yang mempunyai permukaan yang keras, sehingga tingkat reflektivitasnya tinggi. Maka dari itu, objek bangunan, jalan, dan area terbuka dapat terekam dengan baik oleh semua sensor LiDAR.
Perbandingan hasil pengujian pemanfaatan antara data LiDAR dengan pesawat dan UAV untuk objek sungai ditunjukkan pada Tabel 5, dengan tampilan cross section hasil perekaman yang ditunjukkan pada Gambar 11.
Gambar 11. Hasil Perekaman Data LiDAR dengan Pesawat dan UAV pada Objek Sungai
Tabel 5. Perbandingan Hasil Pengujian Pemanfaatan Objek Sungai
| Data LiDAR | ||
|---|---|---|
| Objek | Pesawat | UAV |
| Sampel sungai 1 | Terekam | Tidak Terekam |
| Sampel sungai 2 | Terekam | Tidak Terekam |
| Sampel sungai 3 | Terekam | Tidak Terekam |
| Sampel sungai 4 | Terekam | Tidak Terekam |
| Sampel sungai 5 | Terekam | Tidak Terekam |
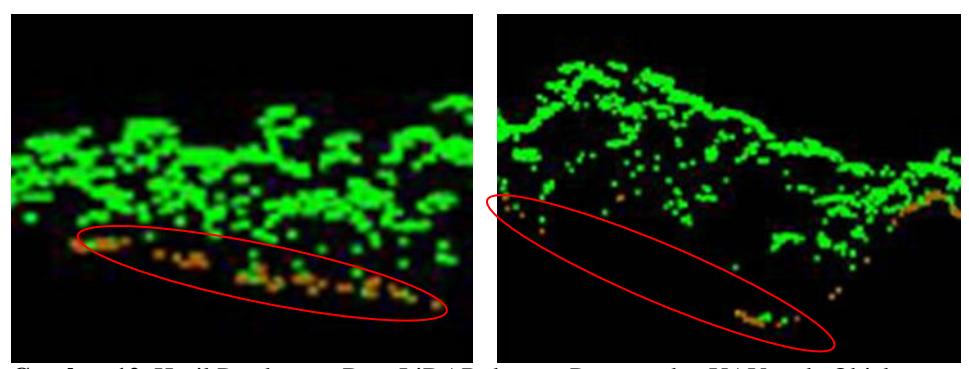
Berdasarkan Tabel 5, seluruh sampel objek sungai yang direkam oleh sensor LiDAR dengan pesawat dapat direkam dengan baik. Namun, hal ini tidak dapat dilakukan oleh sensor LiDAR dengan UAV dikarenakan adanya perbedaan pada jenis gelombang yang dipancarkan sensor LiDAR dengan UAV. Sesuai dengan penelitian sebelumnya yang dilakukan oleh Alif (2010), bahwa gelombang yang dipancarkan pada sensor LiDAR dengan pesawat, diantaranya adalah gelombang hijau dan near infra red (NIR) [8]. Gelombang hijau berfungsi sebagai penetrasi jika sinar laser mengenai daerah perairan dan gelombang NIR berfungsi untuk mengukur topografi daratan. Namun sensor LiDAR dengan UAV tidak memiliki gelombang hijau dan hanya memancarkan gelombang NIR. Untuk itu objek air akan menyerap gelombang NIR sehingga pantulan yang diterima sensor akan sangat sedikit bahkan tidak ada sama sekali. Maka dari itu, objek sungai tidak dapat terekam dengan baik oleh sensor LiDAR dengan UAV.
Perbandingan hasil pengujian pemanfaatan antara data LiDAR dengan pesawat dengan LiDAR dengan UAV untuk objek area vegetasi ditunjukkan pada Tabel 6, dengan tampilan cross section hasil perekaman yang ditunjukkan pada Gambar 12.
Tabel 6. Perbandingan Hasil Pengujian Pemanfaatan Objek Area Vegetasi
| Objek | Data LiDAR | |
|---|---|---|
| Pesawat | UAV | |
| Sampel area vegetasi 1 | Terekam | Tidak Terekam |
| Sampel area vegetasi 2 | Tidak Terekam | Tidak Terekam |
| Sampel area vegetasi 3 | Terekam | Terekam |
| Sampel area vegetasi 4 | Terekam | Terekam |
| Sampel area vegetasi 5 | Terekam | Terekam |
Gambar 12. Hasil Perekaman Data LiDAR dengan Pesawat dan UAV pada Objek Vegetasi
Berdasarkan Tabel 6, terdapat beberapa sampel objek area vegetasi baik yang direkam oleh sensor LiDAR dengan pesawat maupun dengan UAV yang tidak terekam oleh sensor. Beberapa permukaan tanah yang tertutupi oleh vegetasi tidak terekam oleh sensor LiDAR, hal ini dapat menyebabkan hilangnya informasi ground yang dihasilkan, sehingga untuk menghasilkan bentuk DEM yang baik, diperlukan proses editing terhadap data ground yang hilang. Sesuai dengan penelitian sebelumnya yang dilakukan oleh Purnomo (2014), bahwa sensor LiDAR mempunyai kemampuan multiple returns yang berguna untuk melakukan penetrasi atau menerobos diantara vegetasi atau objek lainnya untuk mencapai tanah di bawahnya [9]. Oleh karena itu, dengan kemampuan ini memungkinkan untuk melakukan pengrea yang tertutup vegetasi. Namun, kemampuan laser untuk melakukan penetrasi akan bersensor LiDAR merupakan area vegetasi yang padat, sehingga kemampuan multiple returns yang dimiliki oleh sensor LiDAR tidak dapat menembus celah-celah pohon. Kemampuan multiple returns ini pun dipengaruhi oleh besarnya nilai magnitude yang dapat diketahui pada saat proses pengolahan data LiDAR. Nilai magnitude ini menunjukkan kekuatan atau power dar pesawat lebih besar dibandingkan dengan average magnitude sensor LiDAR dengan UAV, maka dengan power yang lebih besar ini sensor LiDAR dengan pesawat dapat menerima pantulan yang lebih banyak dibandingkan dengan sensor LiDAR dengan UAV.
3.6 Hasil dan Analisis Perbandingan Kontur Data LiDAR
Garis kontur dibentuk dari data DEM yang diperoleh. Pada penelitian ini, garis kontur dibentuk dengan interval 1 meter. Perbandingan garis kontur dari kedua data LiDAR ditunjukkan pada Gambar 13.
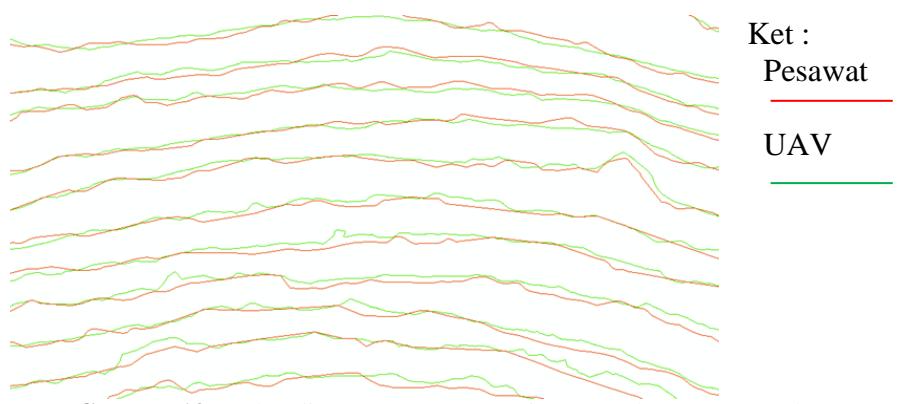
Gambar 13. Perbandingan Kontur Data LiDAR Wahana Pesawat dan UAV
Berdasarkan perbandingan yang ditunjukkan pada Gambar 4.6, maka dapat diketahui bahwa secara garis besar, bentuk garis kontur yang dihasilkan antara kedua data LiDAR menghasilkan bentuk yang hampir sama. Ketidaktepatan posisi garis kontur antara kedua data tersebut dapat disebabkan oleh densitas titik saat akuisisi data. Garis kontur hasil pengolahan data LiDAR dengan pesawat terbentuk dari densitas sebesar 4 ppm, sedangkan untuk LiDAR dengan UAV terbentuk dari densitas sebesar 20 ppm. Perbedaan densitas yang cukup signifikan tersebut mempengaruhi kerapatan titik yang digunakan dalam proses interpolasi linier garis kontur, sehingga garis kontur yang terbentuk dari densitas yang lebih besar menghasilkan bentuk garis yang lebih baik dalam menggambarkan kondisi topografi yang sebenarnya. Selain itu garis kontur ini dibentuk untuk melihat ketelitian elevasi yang dihasilkan. Sesuai dengan hasil analisis ketelitian elevasi, garis kontur yang terbentuk dari data LiDAR dengan UAV pun menghasilkan garis yang lebih teliti dibandingkan garis kontur yang terbentuk dari data LiDAR dengan pesawat.
4. KESIMPULAN
Pada penelitian yang dilakukan pada area seluas 100 ha dengan kondisi topografi bervariatif yang sebagian besar merupakan lahan pertanian datar yang diapit oleh perbukitan, hasil akuisisi LiDAR dengan UAV menghasilkan ketelitian yang lebih tinggi dibandingkan dengan hasil akuisisi LiDAR dengan pesawat, dengan ketelitian elevasi mencapai 0,047 m dengan RMSE sebesar 0,114 m, sedangkan ketelitian elevasi hasil akuisisi LiDAR dengan pesawat mencapai 0,114 m dengan RMSE sebesar 0,122 m. Hasil akuisisi data LiDAR dengan UAV menghasilkan pemanfaatan data LiDAR yang baik untuk semua objek kecuali sungai karena gelombang yang dipancarkan hanya gelombang
NIR saja, sedangkan hasil akuisisi data LiDAR dengan pesawat menghasilkan pemanfaatan data LiDAR yang baik untuk semua objek.
4 References
- [1] Soetaat. (2009). Pengantar LiDAR : Konsep, Proyek dan Aplikasi. Universitas Gadjah Mada. Yogyakarta.
- [2] Sutanta, H. (2002). Penggunaan Airbone Laser Scanning (ALS) untuk Pengadaan DTM Berketelitian Tinggi. Makalah Ikatan Surveyor Indonesia. Jakarta.
- [3] Zuriabangkit, M. (2013). Ketelitian DTM dari Data LiDAR Berdasarkan Perbedaan Tinggi Terbang. Laporan Tugas Akhir. Jurusan Teknik Geodesi. Universitas Gadjah Mada. Yogyakarta.
- [4] Kandia, P. (2012). Pembentukan Model dan Parameter untuk Estimasi Kelapa Sawit Menggunakan Data Light Detection and Ranging (LiDAR). Jurusan Teknik Geodesi dan Geomatika. Institut Teknologi Bandung. Bandung.
- [5] Sithole, G. (2005). Segmentation and Classification of Airborne Laser Scanner Data. NCG Nederlandse Commissie voor Geodesie Netherlands Geodetic Commission. Netherlands.
- [6] Ibadurohaman, A. (2015). Pemodelan Kota Tiga Dimensi Menggunakan Data LiDAR dan Foto Udara Format Medium. Laporan Tugas Akhir. Jurusan Teknik Geodesi. Universitas Gadjah Mada. Yogyakarta.
- [7] Kartika, S. (2010). Analisis Ketelitian Elevasi Hasil Akuisisi LiDAR pada Daerah Beraspal. Laporan Tugas Akhir. Jurusan Teknik Geodesi. Universitas Gadjah Mada. Yogyakarta.
- [8] Alif, T. (2010). Airborne LiDAR Bathymetry. PDKK-BAKOSURTANAL. Cibinong. Bogor.
- [9] Purnomo, W. E. (2014). Pemanfaatan Data LiDAR untuk Penghitungan Jumlah Kanopi Pohon Jati. Jurusan Teknik Geodesi. Universitas Gadjah Mada. Yogyakarta.