
1 Pendahuluan
Gedung Indonesia menggugat yang dibangun pada tahun 1917 merupakan situs sejarah bangsa Indonesia. Gedung Indonesia Menggugat yang terletak di Jalan
| Received, Revised, Accepted for publication |
Perintis Kemerdekaan, Bandung, Jawa Barat adalah gedung di mana Soekarno muda memperjuangkan harkat dan martabat kemanusiaan dihadapan pengadilan kolonial (Landraad) bersama Maskoen, Gatot Mangkoepradja, Soepriadinata, Sastromolejono dan Sartono pada tahun 1930. Peristiwa bersejarah itulah yang kemudian dikenal dengan nama "Indonesia Menggugat". Situs tersebut dinamakan Gedung Indonesia Menggugat pada tahun 2005 oleh almarhum H.C. Mashudi, setelah dilakukan perbaikan secara fisik. Gedung Indonesia Menggugat
Sebagai salah satu bangunan bersejarah, Gedung Indonesia Menggugat harus selalu dirawat dan dijaga agar tetap menjadi warisan budaya yang selalu dalam kondisi baik, sehingga dapat terus ada sampai masa-masa yang akan datang.
akhirnya diresmikan sebagai ruang publik pada tanggal 18 Juni 2007 oleh
Pemerintah Provinsi Jawa Barat (Dibyo dkk., 2006).
Untuk itu salah satu hal yang harus dilakukan adalah pelestarian dan pengarsipan bangunan Gedung Indonesia Menggugat. Bentuk pengarsipan yang bisa dilakukan yaitu dengan membuat model 3D dari bangunan tersebut. Model 3D dapat menggambarkan bentuk terkini dari Gedung Indonesia Menggugat. Model 3D dari gedung ini diharapkan dapat dijadikan acuan untuk melakukan rekonstruksi gedung apabila terjadi bencana alam yang mengakibatkan kerusakan atau kegiatan yang merubah bentuk dari bangunan seperti kegiatan renovasi.
Perkembangan teknologi yang pesat menyebabkan pemodelan 3D dapat dilakukan dengan berbagai cara. Teknologi baru yang dapat digunakan untuk pemodelan 3D yaitu dengan Terrestrial Laser Scanner (TLS). Dengan menggunakan TLS akan didapatkan data berupa awan titik (point cloud). Point cloud merupakan kumpulan titik-titik yang mewakili obyek permukaan yang dimodelkan dengan kerapatan sesuai dengan yang diinginkan. Dari kumpulan titik tersebut kemudian dibentuk model tiga dimensinya. Foto Gedung Indonesia Menggugat ditunjukkan pada Gambar 1.
Gambar 1 Gedung Indonesia Menggugat tampak depan
Pada penelitian ini dilakukan pembuatan model 3D Gedung Indonesia Menggugat untuk mendapatkan informasi detail yang berupa data geometrik dari Gedung Indonesia Menggugat. Analisis ukuran dan volume pada model 3D akan dibahas pada penelitian ini.
2 Metode
Secara skematis metodologi penelitian ini dapat dilihat pada Gambar 2.
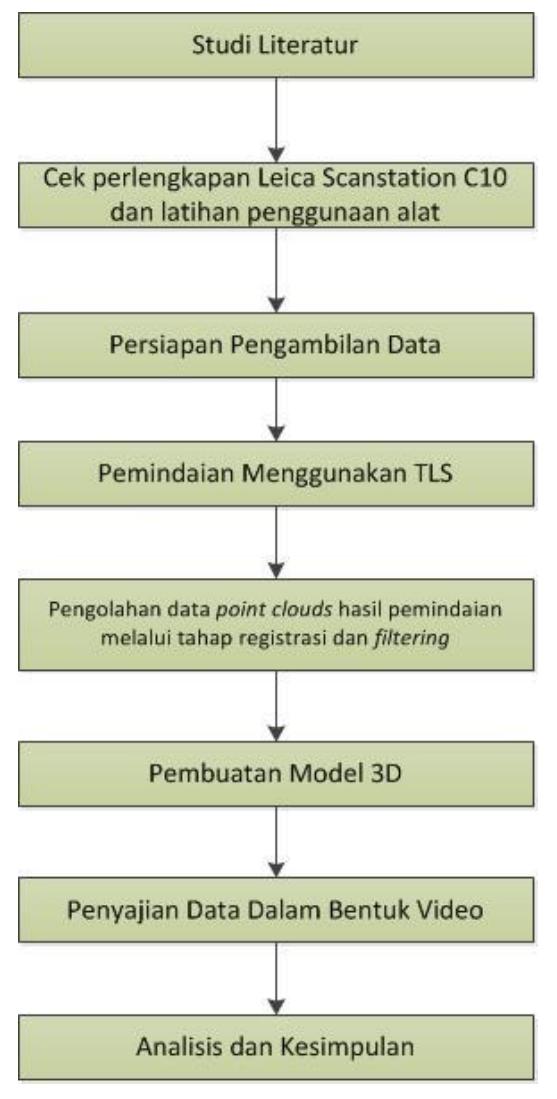
Gambar 2 Skema metodologi penelitian
2.1 Terrestrial Laser Scanner
Terrestrial Laser Scanner (TLS) adalah sebuah metode pemindaian suatu objek menggunakan instrumen laser scanner yang menggunakan cahaya laser. Hasil yang didapatkan dari pengukuran TLS ini adalah awan titik (point cloud) yang mempunyai koordinat 3D yang berpusat terhadap tempat berdiri alat. TLS mempunyai kelebihan dapat merekam data point cloud yang banyak dan padat secara cepat. Sedangkan kekurangan dari TLS adalah tidak dapat merekam warna sesuai dengan warna tampak. Warna yang didapatkan hanya warna intensitas dari gelombang pantulan (Quintero dkk., 2008).
TLS memiliki sistem pengukuran yang terdiri dari pengukuran jarak dan pengukuran sudut. TLS yang berkembang saat ini terbagi menjadi dua jenis metode pengukuran, yaitu berbasis pulsa (Pulse Based) dan berbasis fase (Phase Based). Pada penelitian ini metode yang digunakan adalah metode pengukuran berbasis pulsa atau Pulsed Time of Flight (ToF).
Proses pengukuran jarak berbasis pulsa dari laser yaitu proses pengukuran jarak di mana pemancar laser memancarkan pulsa pendek yang terbagi menjadi dua bagian, satu dipancarkan ke penerima sinyal untuk mengaktifkan unit pengukur waktu, satu lagi dipancarkan ke objek. Saat laser yang dipancarkan menyentuh objek, pancaran laser tersebut akan terpantul kemudian terhambur dan sebagian diantaranya kembali ke detektor pada laser scanner. Jeda waktu antara pulsa dipancarkan ke objek yang dipindai hingga kembali ke diskriminator waktu, digunakan untuk menghitung jarak antara alat dan objek. Proses pengukuran jarak ditunjukkan pada Gambar 3.
Gambar 3 Ilustrasi pengukuran jarak berdasarkan pulsa (Quintero dkk., 2008).
Proses pemindaian menghasilkan nilai jarak titik-titik dari sebuah obyek. Persamaan perhitungan jarak yang digunakan ditunjukkan oleh persamaan 1 (Reshetyuk, 2009):
\[D = \frac{1}{2} \times c \times \Delta t \tag{1}\]
dimana:
D = jarak dari alat ke objek (meter)
c = kecepatan rambat cahaya di udara (≈ 2,997 × 108 meter/detik)
∆t = waktu tempuh pulsa laser (detik)
Selain itu TLS juga memiliki sistem pengukuran sudut yang berguna untuk mendapatkan koordinat point cloud hasil dari pemindaian. Sistem pengukuran sudut terdiri dari angular encoders yang mengukur arah mendatar dan arah tegak. Raw data yang diamati oleh TLS yaitu jarak (R), arah horizontal (), dan sudut vertikal (). Secara garis besar, konsep pengukuran koordinat 3D TLS serta persamaan perhitungannya ditunjukkan pada Gambar 4 dan persamaan 2, 3, 4, & 5.
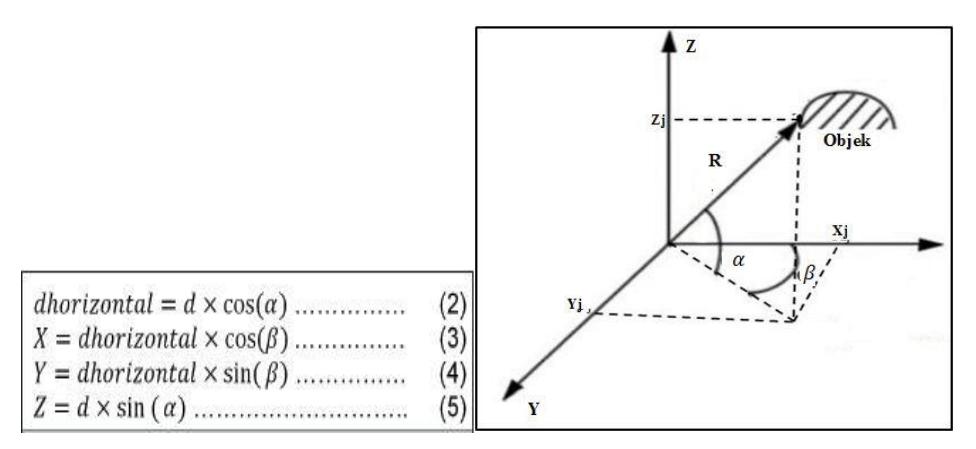
Gambar 4 Konep pengukuran koordinat 3D TLS (Quintero dkk., 2008)
keterangan:
D = jarak hasil dari pengukuran waktu tempuh laser ke objek.
= sudut horizontal antara arah bidikan laser dengan sumbu x alat.
= sudut vertikal antara bidang horizontal dengan arah bidikan laser ke objek.
TLS juga melakukan pengukuran intensitas pantulan sinar laser dari setiap point cloud, selain melakukan ketiga pengukuran pada tiga parameter diatas. Prinsip pengukuran intensitas dari setiap point cloud diilustrasikan pada Gambar 5.
Gambar tersebut hanya memperlihatkan prinsip pengukuran instensitas pada 1 kali pemindaian (pengamatan/pengukuran) saja. Situasi pada umumnya, satu kali pemindaian tidak akan menghasilkan suatu model yang lengkap dari objek yang diinginkan. Harus dilakukan scanning berkali-kali, bahkan terkadang hingga ratusan kali, dari berbagai arah, baru akan diperoleh informasi objek secara keseluruhan.
Gambar 5 Prinsip pengukuran intensitas pada TLS.
2.2 Pengambilan Data
Pengambilan data dilakukan di Gedung Indonesia Menggugat Jalan Perintis Kemerdekaan, No. 5, Babakan Ciamis, Sumurbandung pada tanggal 24 Juli 2014 dengan lama waktu pengukuran dari jam 08.00 – 20.00 WIB. Lokasi pengambilan data dapat dilihat pada Gambar 6.
Pengambilan data dilakukan pada bagian luar dan dalam Gedung Indonesia Menggugat. Alat yang digunakan adalah:
- Leica ScanStation C10.
- Leica 6 inch dan 3 inch HDS target masing-masing 2.
- Statif 5 set.
Gambar 6 Lokasi pengambilan data
Proses pengambilan data menggunakan fitur high resolution dan medium resolution dengan kerapatan titik sebesar 5 cm dan 10 cm dalam jarak 100 m. Fitur high resolution untuk bagian luar gedung karena terdapat objek yang tinggi seperti atap yang membutuhkan hasil pemindaian dengan ketelitian yang tinggi untuk mendapatkan bentuk yang sesuai dengan aslinya. Sedangkan fitur medium resolution digunakan untuk bagian koridor serta dalam gedung karena posisi alat dengan objek cukup dekat. Proses pengambilan data dilakukan dalam 18 kali berdiri alat (station).
2.3 Pengolahan Data
Data yang didapat dari pengambilan data menggunakan TLS yaitu berupa data awan titik (point cloud). Untuk mendapatkan hasil objek yang utuh dari semua tempat berdiri alat diperlukan proses registrasi. Setelah itu dilakukan proses filtering untuk menghilangkan derau (noise) yaitu objek-objek yang ikut terpindai dan tidak diperlukan untuk pemodelan ini. Tahapan selanjutnya adalah membuat model 3D dari point cloud yang sudah melewati tahapan filtering. Skema pengolahan data yang dilakukan pada penelitian ini dapat dilihat pada Gambar 7.
Gambar 7 Skema pengolahan data
2.3.1 Registrasi
Untuk mendapatkan hasil pemindaian yang utuh dari suatu objek, diperlukan pemindaian dari beberapa tempat berdiri alat. Point cloud yang dihasilkan pada setiap pemindaian, memiliki koordinat sistem internal yang direferensikan terhadap alat.
Pada penelitian kali ini menggunakan metode registrasi target based registration dan cloud to cloud registration. Awalnya registrasi hanya akan dilakukan dengan menggunakan metode target based registration. Pemilihan tersebut dikarenakan metode target based registration adalah metode yang paling baik secara kualitas (Mochtar, 2012).
Dalam proses registrasi antara beberapa station diperlukan 3 target yang diketahui koordinat tiga dimensinya (Reshetyuk, 2009). Sebagai ukuran lebih, pada penelitian ini menggunakan 4 target. Dengan ukuran lebih tersebut, target yang memiliki nilai galat registrasi melebihi batas toleransi dapat dihilangkan atau dinonaktifkan.
Pada beberapa station menunjukkan nilai galat registrasi yang melebihi batas toleransi yaitu 6 mm, setelah dilakukan proses registrasi menggunakan target based registration. Untuk menyelesaikan hal itu, target dan station yang memiliki galat registrasi melebihi batas toleransi dapat dinonaktifkan.
Setelah dinonaktifkan ternyata masih terdapat station yang memiliki nilai galat registrasi melebihi batas toleransi sehingga digunakan metode registrasi cloud to cloud. Metode registrasi cloud to cloud merupakan metode registrasi kedua
terbaik setelah target based registration. Hasil kedua metode registrasi tersebut dikombinasikan untuk mendapatkan hasil registrasi secara keseluruhan.
Proses registrasi dilakukan dengan menggunakan perangkat lunak Cyclone 8.1. Dari hasil registrasi secara keseluruhan yang menggunakan 2 metode, didapatkan nilai galat registrasi berada diantara 1-6 mm. Galat registrasi rata-rata memiliki nilai sebesar 1 mm.
Galat registrasi terjadi akibat pergeseran nivo pada TLS saat leveling di dua station yang berbeda dan pada target ketika diputar menghadap arah TLS berpindah. Total jumlah titik yang dihasilkan yaitu sebanyak 279.376.037 titik. Hasil registrasi ditunjukkan pada Gambar 8.
Gambar 8 Hasil registrasi menggunakan perangkan lunak Cyclone 8.1 tampak barat (a) dan tampak timur (b)
2.3.2 Filtering
Tahap filtering merupakan proses pemilihan antara data point cloud yang diperlukan maupun tidak. Data point cloud yang tidak diperlukan akan dibuang. Data point cloud yang tidak diperlukan biasanya berupa mobil, bangunan, pohon, atau manusia yang ikut terpindai. Pada filtering yang dilakukan adalah menandai sebuah area point cloud, kemudian dilakukan pemilihan bagian dalam atau luar dari area yang akan dihapus.
Proses filtering merupakan salah satu proses yang sangat penting. Teliti atau tidaknya proses ini akan berpengaruh terhadap baik atau buruknya hasil akhir nantinya. Titik yang tidak diperlukan dapat dihapus dalam perangkat lunak Cyclone 8.1 menggunakan beberapa fitur. Fitur pertama yang dapat digunakan yaitu fence. Dengan fitur ini, bagian yang tidak ingin diikutsertakan dibatasi dengan membentuk poligon sesuai bentuk dari objek tersebut. Kemudian bagian dalam atau luar yang telah ditandai dengan fitur fence dihapus. Ilustrasi tahap filtering menggunakan fitur fence serta hasilnya dalam perangkat lunak Cyclone 8.1 ditunjukkan pada Gambar 9.
Gambar 9 Pembatasan area yang akan dihapus dengan teknik fence (a) dan hasilnya (b)
Selain menggunakan fitur fence, proses filtering juga dapat dilakukan dengan menggunakan fitur limit box pada perangkat lunak Cyclone 8.1. Objek yang cukup besar areanya dapat dipersempit dengan fitur limit box sehingga dapat memudahkan proses filtering.
Fitur lainnya yang dapat digunakan yaitu point cloud sub-selection. Dengan fitur ini dapat dipilih salah satu dari dua pilihan yang ada yaitu hide unselected cloud atau hide select cloud. Objek-objek yang tidak diperlukan dapat dihilangkan sementara supaya lebih teliti. Dengan fitur-fitur ini hasil yang didapatkan benarbenar sesuai dengan yang akan ditampilkan. Ilustrasi fitur limit box dan point cloud sub-selection dapat dilihat pada Gambar 10.
Gambar 10 Fitur limit box dan point cloud sub selection.
Data point cloud sudah terbebas dari derau setelah melalui proses filtering. Data point cloud tentu mengalami pengurangan dari jumlah awal. Jumlah point cloud sebelum filtering yaitu 279.376.037 titik. Dari hasil filtering terjadi pengurangan jumlah point cloud menjadi 276.546.084 titik.
Perbedaan jumlah point cloud sebelum dan sesudah filtering tergantung dari banyaknya derau yang terpindai pada saat pengambilan data. Hal tersebut tergantung kondisi objek pada saat pengambilan data. Pada penelitian ini cukup banyak derau yang terpindai dikarenakan Gedung Indonesia Menggugat merupakan ruang publik, sehingga banyak kendaraan di bagian halaman dan orang-orang yang sedang berkegiatan baik di luar maupun di dalam gedung. Posisi bangunan yang berada di antara bangunan lain juga menyebabkan bagian atap tidak terpindai sempurna. Di beberapa bagian juga terlihat hasil kerapatan titik yang kurang baik, ditambah dengan hasil filtering yang meninggalkan bekas. Data point cloud hasil filtering dapat dilihat pada Gambar 11.
Gambar 11 Data point cloud hasil filtering.
3 Hasil dan Pembahasan
3.1 Pembuatan Model 3D
Data point cloud yang telah melewati tahap filtering masih berupa titik-titik yang membentuk objek. Proses pengolahan lebih lanjut perlu dilakukan untuk mendapatkan model 3D yang utuh. Dalam pengolahannya diperlukan beberapa perangkat lunak yang menunjang pembuatan model 3D. Perangkat lunak yang digunakan disesuaikan dengan data point cloud, hasil model yang diinginkan, serta kerumitan model yang akan dibuat. Penelitian ini mengkombinasikan beberapa perangkat lunak untuk mendapatkan model 3D Gedung Indonesia Menggugat. Perangkat lunak yang digunakan yaitu Geomagic Studio, Autodesk Recap 2015, SketchupPro 8, dan 3DS max 2015.
Data point cloud yang sangat besar menyebabkan perlunya dilakukan pemilahan pada data point cloud sebelum diolah lebih lanjut. Kondisi Gedung Indonesia Menggugat yang terdiri dari banyak ruangan juga merupakan alasan diperlukannya hal tersebut. Data point cloud dipilah berdasarkan ruangan dan objek detail. Setelah dipilah, data point cloud harus diubah ke dalam format ekstensi pts supaya dapat dibuka dan diolah di perangkat lunak lain.
Penggunanaan berbagai perangkat lunak didasarkan pada kondisi dan tingkat kerumitan objek. Untuk bentuk yang cukup kompleks digunakan proses mesh pada perangkat lunak Geomagic Studio. Untuk objek yang tidak terpindai secara utuh maka dilakukan penggambaran model 3D dengan menggunakan perangkat lunak Google Sketchup. Penggambaran dilakukan dengan menggunakan data ukuran dari point cloud yang terlebih dahulu diukur dengan menggunakan
perangkat lunak Autodesk Recap. Skema pembuatan model 3D dapat dilihat pada Gambar 12.
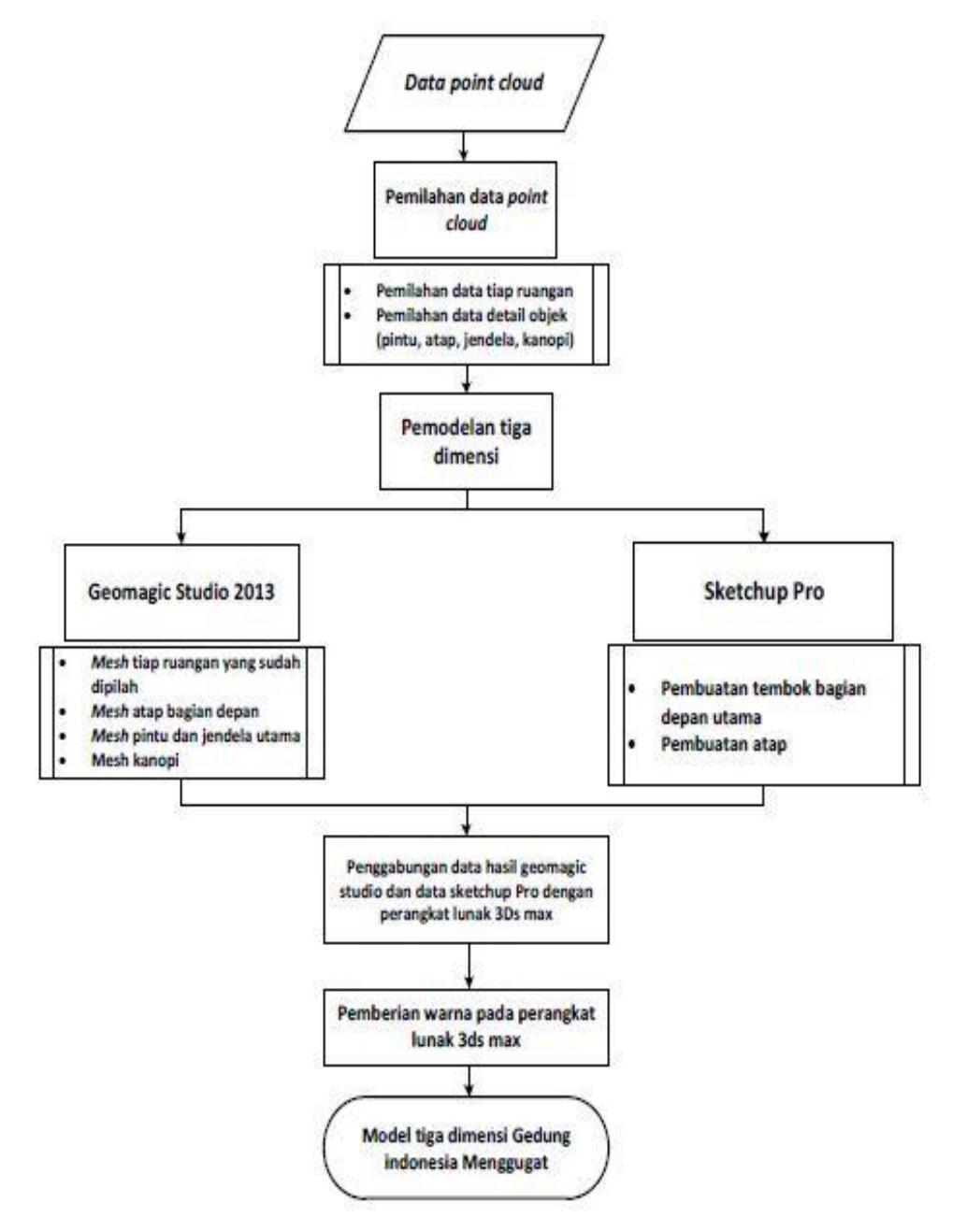
Gambar 12 Skema pembuatan Model 3D
3.1.1 Pemilahan Data Point Cloud
Gedung Indonesia Menggugat terdiri dari 9 ruangan utama menyebabkan data point cloud hasil pemindaian berjumlah banyak dan berukuran besar. Hal tersebut menyebabkan proses pembuatan model 3D membutuhkan waktu yang lama. Hasil yang didapatkan pun menjadi kurang maksimal.
Detail dari model yang didapatkan kurang terlihat. Solusi yang dapat dilakukuan adalah melakukan pemilahan data point cloud. Pemilahan point cloud dilakukan berdasarkan masing-masing ruangan dan juga objek-objek yang menjadi ciri khas dari Gedung Indonesia Menggugat seperti pintu, atap, jendela, dan kanopi. Pemilahan ruangan meliputi lobi (ruang utama), ruang sidang, ruang meeting, ruang Supriyadinata, ruang makan, dan 3 ruangan yang menyambung yaitu ruang Soekarno (aula utama), ruang Maskoen (ruang screening), serta ruang Gatot Mangkoepradja (ruang pameran).
Pemilahan dilakukan menggunakan perangkat lunak Cyclone 8.1. Fitur yang digunakan sama seperti pada saat melakukan filtering, yaitu fence, limit box, serta point cloud sub selection. Pada proses ini point cloud tidak dihapus secara permanen seperti pada filtering tetapi hanya dihilangkan untuk sementara. Setelah didapatkan hasil sesuai yang diinginkan, kemudian point cloud diubah formatnya menjadi format ekstensi pts. Gambar point cloud Gedung Indonesia Menggugat tampak atas dan hasil pemilahan pada ruang utama ditunjukkan pada Gambar 13.
Gambar 13 Point Cloud Gedung Indonesia Menggugat tampak atas (a) dan point cloud ruang utama hasil pemilahan (b)
3.1.2 Pembuatan Model 3D dengan Menggunakan Geomagic Studio.
Pembuatan model 3D pada perangkat lunak Geomagic Studio dilakukan dengan melalui proses mesh menggunakan fitur wrap. Proses wrap digunakan untuk mengubah data point cloud ke dalam bentuk poligon dengan membentuk TIN (Triangulated Irregular Network). Seperti yang sudah dijelaskan sebelumnya, data point cloud yang akan diproses menggunakan Geomagic Studio adalah data point cloud yang telah dipilah. Ilustrasi beberapa bagian hasil sebelum dan sesudah proses mesh dapat dilihat pada Gambar 14.
Gambar 14 Perbandingan data point cloud sebelum (kiri) dan sesudah proses mesh (kanan) pada jendela (a) dan pintu utama (b).
Kualitas dari hasil mesh sangat tergantung dari kerapatan titik point cloud. Hasil proses mesh dikatakan memiliki kualitas yang bagus ketika poligon yang dihasilkan terbentuk sempurna sesuai dengan bentuk aslinya tanpa adanya bagian yang kosong ataupun hilang. Pada kenyataannya hasil yang didapat dari proses mesh masih terdapat bagian yang kosong ataupun hilang. Hal ini dikarenakan pada proses pengambilan data, objek tersebut terhalang oleh derau. Ketika derau dihilangkan pada proses filtering, bagian dari objek tersebut menjadi kosong ataupun hilang.
Proses pengisian bagian yang kosong ataupun hilang dapat dilakukan pada perangkat lunak Geomagic Studio dengan memanfaatkan fitur hole filling. Ada dua metode yang bisa digunakan, yaitu fill all dan fill single. Dengan fill allsemua objek yang bolong dapat terisi langsung dengan cepat. Metode ini cocok untuk objek yang memiliki lubang-lubang kecil yang jumlahnya cukup banyak. Kelemahannya adalah metode ini dapat merusak bentuk objek. Objek dapat tertutup semua apabila terdapat bagian bolong atau hilang yang merambat ke bagian-bagian lain. Bentuk dari objek dapat tidak terlihat akibat tertutup objek baru hasil pengisian. Metode lainnya yaitu metode fill single. Dengan metode ini proses pengisian dilakukan satu per satu. Detail atap sebelum dan sesudah proses hole filling ditunjukkan pada Gambar 15.
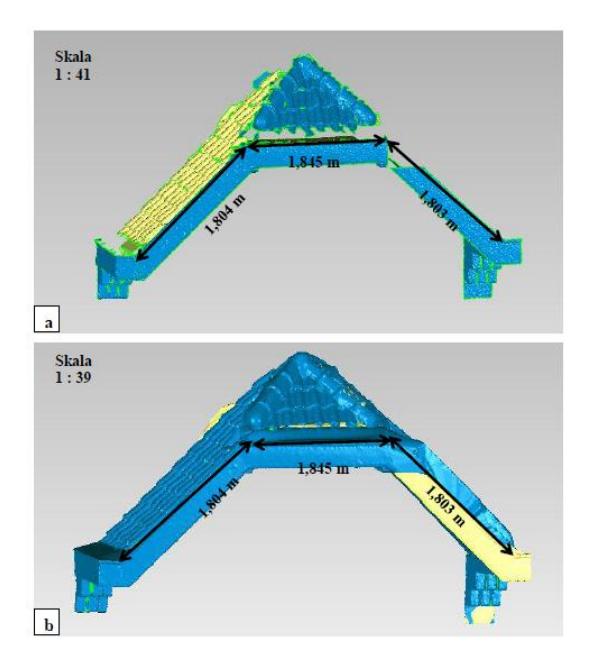
Gambar 15 Detail atap sebelum (a) dan sesudah (b) proses hole filling.
3.1.3 Penggambaran dengan Google Sketchup
Objek yang tidak terpindai secara utuh dan tidak dapat dimodelkan dengan proses mesh, digambarkan dengan menggunakan perangkat lunak Google Sketchup. Objek tersebut diantaranya tembok bagian depan dan atap selain atap depan. Tembok bagian depan tidak dapat dimodelkan dengan proses mesh dikarenakan banyaknya derau yang menghalangi pada saat pengambilan data. Derau tersebut diantaranya kendaraan yang sedang parkir di halaman gedung, pot serta tanaman yang menghiasi sepanjang tembok bagian depan. Banyaknya derau menyebabkan kurang maksimalnya proses pemodelan dengan menggunakan mesh. Bagian
lainnya yaitu atap selain atap depan. Hal tersebut dikarenakan bagian atap yang terpindai secara utuh hanya atap bagian depan saja.
Point cloud diukur dimensinya dengan menggunakan perangkat lunak Autodesk Recap sebelum proses penggambaran. Dan pengukuran jarak menggunakan fitur distance. Penggunaan fitur ini dilakukan dengan memilih point cloud pada kedua ujung yang ingin diukur dimensinya. Point cloud yang dipilih harus benar-benar dipastikan sesuai dengan bagian yang ingin diukur dimensinya. Terkadang pemilihan point cloud tidak sesuai karena banyaknya jumlah point cloud. Diperlukan kecermatan dan ketelitian dalam pemilihan kedua ujung point cloud yang akan diukur dimensinya. Ilustrasi pengukuran jarak pada perangkat lunak Autodesk Recap ditunjukkan pada Gambar 16.
Gambar 16 Ilustrasi pengukuran jarak pada perangkat lunak Autodesk Recap
Tahapan selanjutnya adalah penggambaran model dengan perangkat lunak Google Sketchup. Data ukuran yang didapatkan digunakan sebagai ukuran pembuatan model 3D, sehingga model yang digambarkan sesuai dengan ukuran aslinya. Seperti yang sudah dijelaskan sebelumnya objek yang digambarkan adalah tembok bagian depan serta atap selain atap depan. Hasil penggambaran dengan menggunakan Google Sketchup dapat dilihat pada Gambar 17.
Gambar 17 Hasil penggambaran dengan menggunakan Google Sketchup pada bagian atap (a) dan tembok depan (b)
3.1.4 Penggabungan Data Hasil Geomagic Studio dengan Google Sketchup
Penggabungan dilakukan untuk mendapatkan model 3D Gedung Indonesia Menggugat secara utuh. Model yang sudah dibuat pada perangkat lunak Geomagic Studio dan Google Sketchup digabungkann dalam perangkat lunak 3ds Max. Model dari kedua perangkat lunak tersebut harus diubah formatnya terlebih dahulu ke ekstensi obj, supaya dapat dibuka pada perangkat lunak 3ds Max. Model memiliki posisi yang berbeda beda satu sama lain, saat diimpor ke dalam perangkat lunak 3ds Max. Hal tersebut dikarenakan masing-masing perangkat lunak mempunyai acuan koordinat yang berbeda. Proses menyatukannya dapat menggunakan fitur move dan rotate pada 3ds Max. Hasil penggabungan model masih belum memiliki warna yang sesuai dengan aslinya. Untuk itu perlu dilakukan pemberian warna pada masing-masing objek. Pemberian warna menggunakan warna asli yang didapatkan dari dokumentasi pada saat pengambilan data. Hasil penggabungan pada perangkat lunak 3ds Max. Hasil penggabungan pada 3ds Max ditunjukkan pada Gambar 18.
Gambar 18 Hasil penggabungan pada perangkat lunak 3ds Max
Hasil akhir dari proses pembentukan model 3D adalah model yang sudah memiliki warna dan tekstur sesuai dengan kondisi aslinya. Model yang sudah dibentuk akan dianalisis dari berbagai aspek. Hasil pembentukan model 3D tampak depan dan model 3D ruang utama Gedung Indonesia Menggugat ditunjukkan pada Gambar 19, Gambar 20, dan Gambar 21.
Gambar 19 Hasil model 3D Gedung Indonesia Menggugat tampak depan (a) foto tampak depan Gedung Indonesia Menggugat (b)
Gambar 20 Hasil model 3D Gedung Indonesia Menggugat bagian ruang utama (a) dan foto ruang utama Gedung Indonesia Menggugat (b)
Gambar 21 Hasil model 3D Gedung Indonesia Menggugat dan foto Gedung Indonesia Menggugat (kiri-kanan) pada aula (a), ruang pameran (b), cafe (c), dan ruang sidang (d)
Hasil model 3D menunjukkan pada beberapa bagian memiliki bentuk yang tidak sempurna seperti tekstur yang hilang serta tidak tertutup dengan sempurna. Hal tersebut secara seni merupakan hal yang harus dihindari. Pemodelan 3D juga berkaitan dengan seni, sehingga perlu diperhatikan terkait seni dan estetika pada pembuatan modelnya.
Hasil yang kurang sempurna diakibatkan oleh beberapa hal. Pertama, point cloud kurang rapat sehingga pada bagian tersebut hilang ataupun bolong. Pada proses mesh, bagian yang hilang tersebut akan ditutup oleh perangkat lunak Geomagic Studio memanfaatkan fitur hole filling. Fitur hole filling dapat menutup bagian yang hilang tetapi tidak sesuai dengan tekstur aslinya. Kedua, kurangnya
ketelitian pada saat melakukan filtering. Bagian yang seharusnya tidak dihilangkan tetapi ikut hilang. Ketiga, bagian yang hilang awalnya tertutup oleh derau. Bagian tersebut menjadi hilang setelah derau dihilangkan.
Pada model 3D juga terdapat objek-objek yang dihilangkan dalam proses pembentukannya seperti pada jendela.di bagian depan Gedung Indonesia Menggugat. Dapat dilihat pada Gambar 19 (a) jendela terdiri dari dua bagian yaitu bagian yang terbuka dan bagian utama dari jendela. Sedangkan pada model yang ditunjukkan Gambar 19 (b) hanya bagian utama dari jendela saja yang termodelkan. Hal tersebut dikarenakan point cloud yang kurang rapat dan berlubang pada bagian jendela yang terbuka. Kondisi tersebut menyebabkan hasil meshing tidak sempurna. Bentuk objek menjadi tidak sesuai dengan bentuk aslinya. Bagian tersebut cukup sulit untuk digambarkan menggunakan perangkat lunak Google Sketchup, sehingga bagian yang termodelkan hanya bagian utamanya saja.
3.2 Analisis Ukuran
Pengukuran detail geometrik bangunan diperlukan untuk membandingkan ukuran hasil model 3D dengan ukuran sebenarnya. Pada penelitian ini dilakukan pengukuran detail geometrik juga untuk mengetahui kualitas hasil model 3D. Detail geometrik bangunan diukur menggunakan distometer. Ukuran jarak ini bisa digunakan untuk melakukan proses rekonstruksi bangunan jika terjadi perubahan bentuk.
Dari hasil pengukuran dan perbandingan didapat nilai selisih antara jarak pada model 3D dengan jarak hasil distometer maksimum sebesar 0,023 m dan minimum 0,001 m. Perbedaan tersebut dapat terjadi akibat pengaruh dari galat registrasi. Galat registrasi terjadi akibat pergeseran nivo pada TLS saat leveling di dua station yang berbeda dan pada target ketika diputar menghadap arah TLS berpindah. Perbandingan ukuran jarak pada distometer dengan model 3D dapat dilihat pada Tabel 1.
| No | Bagian | Ukuran distometer (m) | Ukuran Model 3D (m) | Distometer- Model 3D (m) |
|---|---|---|---|---|
| 1 | Lebar pintu masuk | 2,509 | 2,505 | 0,004 |
| 2 | Lebar lobi | 3,906 | 3,902 | 0,004 |
| 3 | Panjang lobi | 10,604 | 10,607 | -0,003 |
| 4 | Lebar aula | 6,004 | 6,006 | -0,002 |
| 5 | Panjang aula | 16,59 | 16,586 | 0,004 |
| 6 | Lebar R. Maskoen | 6,009 | 6,005 | 0,004 |
| 7 | Panjang R. Maskoen | 10,975 | 10,952 | 0,023 |
| 8 | Panjang R. Gatot | 13,725 | 13.73 | -0.005 |
Tabel 1 Perbandingan ukuran jarak pada model 3D dengan distometer
Pengaruh lain yang menyebabkan perbedaan ukuran model 3D dengan ukuran sebenarnya yaitu laser yang ditembakkan oleh distometer tidak lurus sempurna. Pengukuran model 3D dilakukan dengan menggunakan perangkat lunak Autodesk Recap 2015. Pengukuran dilakukan pada beberapa bagian dari Gedung Indonesia Menggugat.
3.3 Analisis Volume
Perhitungan volume dapat dilakukan pada hasil model 3D Gedung Indonesia Menggugat. Perhitungan dilakukan sebagai salah satu cara untuk mendapatkan data geometrik serta informasi detail dari Gedung Indonesia Menggugat. Tidak semua bagian dari Gedung Indonesia Menggugat yang dihitung volumenya. Bagian yang dapat dihitung volumenya hanya bagian-bagian yang memiliki bentuk objek yang tertutup dan tidak memiliki lubang-lubang besar. Ruangan tersebut diantaranya ruang utama (lobi), ruang sidang, aula, ruang Supriyadinata, ruang Maskoen, dan ruang Gatot Mangkoepradja.
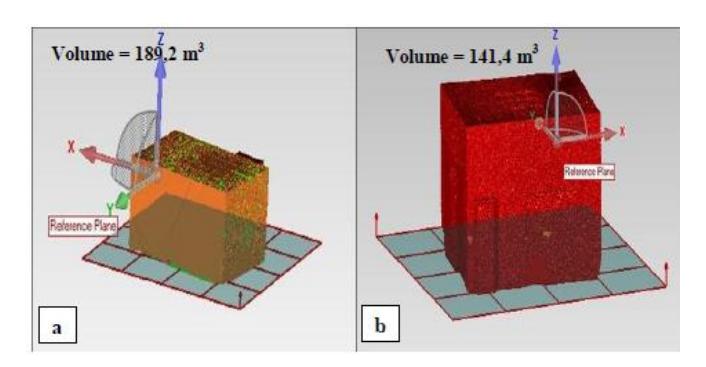
Perhitungan volume dilakukan dengan menggunakan perangkat lunak Geomagic Studio 2013 dengan memanfaatkan fitur compute volume to plane. Caranya dengan menempatkan bidang referensi pada objek yang akan dihitung volumenya. Bidang referensi kita atur sedemikian rupa pada model 3D. Bidang referensi dapat diletakkan di atas, di bawah, maupun di tengah-tengah model 3D. Volume dihitung berdasarkan jarak antara bidang referensi dengan objek yang terletak di atas maupun di bawahnya. Ilustrasi dari perhitungan volume Gedung Indonesia Menggugat ditunjukkan pada Gambar 22 dan Gambar 23.
Gambar 22 Perhitungan volume model 3D Gedung Indonesia Menggugat pada ruang utama (a) dan gabungan aula, ruang Maskoen, dengan ruang Gatot (b)
Gambar 23 Perhitungan volume model 3D Gedung Indonesia Menggugat pada ruang sidang (a) dan ruang Supriyadinata (b)
Total volume dari ruangan-ruangan tersebut sebesar 1942,8 m3 . Nilai volume yang didapat tidak sepenuhnya sesuai dengan volume aslinya. Hal ini diakibatkan masih terdapat lubang-lubang kecil pada model 3D. Selain itu, terdapat juga bagian-bagian hasil dari proses meshing yang kurang sempurna. Sehingga menyebabkan perubahan nilai volume dari model 3D Gedung Indonesia Menggugat.
4 Kesimpulan dan Saran
4.1 Kesimpulan
Dari keseluruhan rangkaian proses yang dilakukan pada penelitian ini dapat diambil kesimpulan yaitu:
- 1. Nilai galat hasil registrasi point clouds sebesar 1 mm
- 2. Pembuatan model 3D untuk bangunan bersejarah, Gedung Indonesia Menggugat, menghasilkan selisih galat model dengan jarak objek sesungguhnya sebesar 6 mm
- 3. Proses pembuatan mesh model 3D dari TLS di beberapa kajian, masih terdapat kekosongan data, sehingga hasi; model 3D kurang sempurna
4.2 Saran
Dari penelitian ini dapat diberikan saran untuk perbaikan selanjutnya. Saran yang diberikan yaitu:
- 1. Memerlukan perbandingan pembuatan model 3D dari data selain TLS untuk bangunan bersejarah
- 2. Perlu dikembangkan penelitian untuk semantic bangunan bersejarah
5 Daftar Pustaka
- [1] Abbas, M. A., Luh, L. C., Setan, H., Majid, Z., Chong, A. K., Aspuri, A., Idris, K. M., Farid, M., Ariff, M (2014). Terrestrial Laser Scanners Pre-Processing: Registration and Georeferencing. Jurnal Teknologi (Sciences and Engineering), 115-122.
- [2] Adhitiaputra, R. (2013). Mekanisme Kalibrasi Terrestrial Laser Scanner. Bandung: Program Studi Teknik Geodesi dan Geomatika Institut Teknologi Bandung.
- [3] Balis, V., Karamistos, S., Kotsis, I., Liapakis, C., & Simpas N. (2004). 3D-Laser Scanner: Integration of Point Cloud and CCD Camera Video Data for the Production of High Resolution and Precision RGB Textured Models: Archaeological Monuments Surveying Application in Ancient Ilida. In: Proceedings of FIG Working Week, Athens, Greece, May 22 – 27.
- [4] Barber, D ., & Mills, J. (2007). 3D Laser Scanner for Heritage: Adviceand Guidance to Users on Laser Scanner in Archeology and Architecture. United Kingdom: English Heritage Publishing.
- [5] Barber, D., & Mills, J. (2011). 3D Laser Scanner for Heritage (Second Edition): Advice and Guidance to Users on Laser Scanner in Archeology and Architecture. United Kingdom: English Heritage Publishing
- [6] Dibyo, H., Mashudi, D., & Ruchlia. (2006). Indonesia Menggugat Pemugaran Monumen Pemugaran Bangsa. Bandung: Geger Sunten
- [7] Grantham Coates Surveis. (2012, March 9). Retrieved January 21, 2015, from www.gcSurveis.co.uk: http://www.gcSurveis.co.uk/blog/whitneyon-wye-toll-bridge-measured-building-Survei
- [8] Leica Geosystems. (2011). Leica Scan Station C10. Heerbrugg, Switzerland :Leica GeoSystems AG.
- [9] Mochtar. (2012). Perbandingan Metode Registrasi Terrestrial Laser Scanner (Studi Kasus: Aula Timur dan Gardu Listrik GKU Timur). Bandung: Institut Teknologi Bandung
- [10] Pfeifer, N. (2007, July 1-7). Overview of TLS system, overall processing and applications. Ljubljana, Slovenia: ISPRS Summer School
- [11] Quintero, M. S., Genechten, B. V., & Hankar, M. (2008). Theory and Practice on Terrestrial Laser Scanner 3D Risk Mapping, 14-133.
- [12] Reshetyuk, Y. (2009). Self-Calibration and Direct Georeferencing in Terrestrial Laser Scanner. Stockholm: Royal Institute of Technology.