
1 Pendahuluan
Dalam upaya perbaikan jembatan dilakukan berbagai metode untuk mempertahankan keadaan struktur jembatan karena keadaan jembatan yang saat ini tidak dapat lagi diperbaiki seperti semula melainkan dilakukan pelapisan pilar (jacketing), penambahan pasak bumi disekitar pondasi jembatan, pemasangan penahan baja (strutting) penahan pergerakan antar pilar dan banyak metode lainnya. Selama proses perbaikan dilakukan monitoring menggunakan metode RTS (Robotic Total Stastion), sipat datar, Electronik Total Station (ETS), dan Reflectorless yang menghasilkan titik koordinat yang menggambarkan pergeseran tiang jembatan secara kontinyu.
| Received, Revised, Accepted for publication |
|---|
Gambar 1 Jembatan Cisomang KM.100 Tol Cipularang (sumber: PT. LAPI ITB)
Adanya akuisisi data tambahan menggunakan TLS (Terrestrial Laser Scanner) dapat menggambarkan keadaan jembatan Cisomang sebenarnya secara tiga dimensi, sehingga lebih mudah untuk menganalisis penyebab dan dampak dari pergerakan jembatan. Data yang diperoleh dalam proses pemindaian tersebut berupa kumpulan awan titik (point clouds) dalam jumlah besar. Point clouds yang dihasilkan mewakili permukaan objek yang dipindai, yang kemudian dapat dimodelkan, ditampilkan dan dimanipulasi di layar komputer (Rüther dkk., 2009). Hasil yang diperoleh dari proses pemodelan dengan TLS tentu akan jauh lebih baik apabila dibandingkan dengan menggunakan alat yang bersifat analog berupa theodolite atau bahkan menggunakan Electronic Total Station (ETS) sekalipun yang akan dibuktikan pada bagian selanjutnya. Selain itu, penggunaan TLS untuk pemodelan tiga dimensi juga lebih mudah dibandingkan dengan ETS dan theodolite.
Dalam penelitian ini melalui model tiga dimensi jembatan Cisomang yang terbentuk melalui proses pengolahan data hasil akuisisi dapat memeberikan informasi ukuran jarak maupun sudut dari pier. Hasil ukuran digunakan untuk menghitung deformasi yang terjadi pada jembatan Cisomang berupa perubahan bentuk, kemiringan, dan rotasi pada tiang jembatan dan tak terlepas juga dari kualitas model yang dihasilkan.
2 Materi dan Metode
2.1 Metodologi
Dalam penyusunan penelitian ini, metodologi penelitian yang dilakukan adalah sebagai berikut: Persiapan, Persiapan Akuisisi Data, Akuisisi Data, Pengolahan Data, Pembuatan Model Tiga Dimensi, Penyajian Data, Analisis Hasil dan Kesimpulan. Secara garis besar metodologi ditunjukkan oleh diagram alir sesuai dengan Gambar 2.
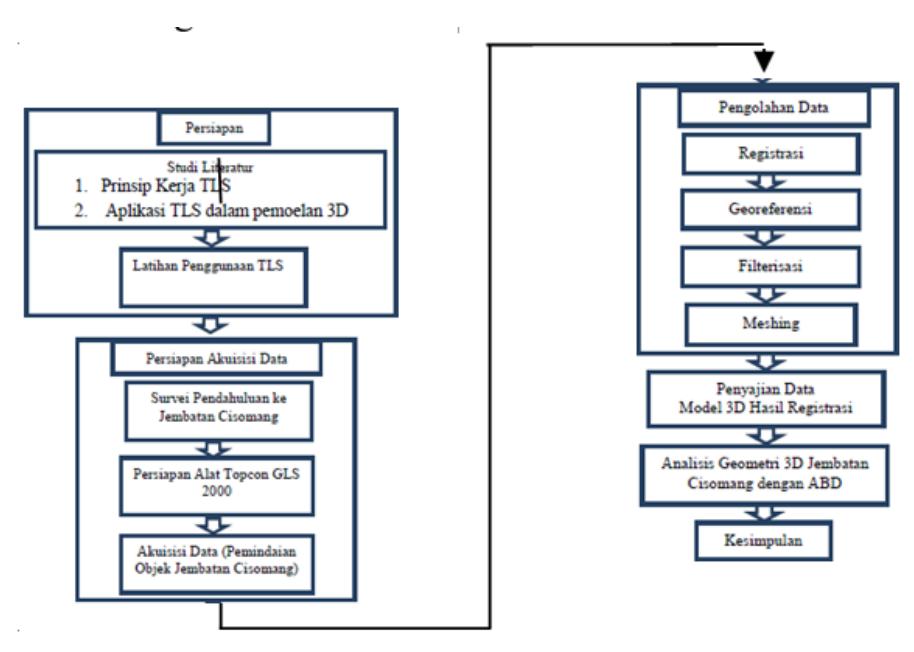
Gambar 2 Metodologi pengukuran TLS
2.2 Teori Dasar
Berdasarkan Barker dan Puckett (1997), kontruksi jembatan girder prategang umumnya digunakan untuk bentangan yang pendek, yaitu maksimum 40 hingga 45 meter. Dengan batasan panjang bentang tersebut, dibutuhkan banyak pier tinggi untuk menumpu struktur girder yang ada, bilamana sistem tersebut digunakan untuk menjembatani lembah sungai Cisomang. Khusus untuk jembatan Ciomang ini, pier yang dibutuhkan dapat mencapai ketinggian 50 meter. Dengan pier seperti ini, deformasi lateral yang dapat terjadi pada kondisi gempa akan sangat besar sehingga menggunakan sistem simple beam (balok sederhana) menjadi kurang layak secara teknis, khususnya terkait dengan kebutuhan sistem bearing yang harus mampu mengakomodasi gaya dan deformasi yang terjadi pada tumpuan serta kebutuhan kekakuan yang tinggi untuk mencapai stabilitas yang memadai pada pier tinggi. Konstruksi girder untuk jembatan dengan pier tinggi (yaitu pier dengan ketinggian melebihi 40 meter) umumnya dibuat menerus atau integral dengan struktur pier-nya.
Jembatan Cisomang diberitakan adanya pergerakan antar tiang jembatan sehingga terjadi kerusakan struktur jembatan yang mengharuskan dilakukan perbaikan. Berikut adalah sedikit penjelasan tentang masalah tersebut yang ditunjukkan oleh Gambar 3.
Gambar 3 Profil lapisan tanah Cisomang (sumber: PT. LAPI ITB)
Pada bagian pier P2 dan P3 dari data Geologi terdapat lapisan Clay Hale ditandai adanya mineral monmorilnite, yang memiliki sifat swelling dan slaking. Swelling adalah sifat menyerap air sehingga mengembang sedangkan slaking adalah lapisan yang akan retak setelah air keluar dari lapisan tersebut. Hal ini ditandai dengan banyaknya longsoran kecil di permukaan topografi jembatatan.
Pada Laser Ranging pengukuran jarak dilakukan pada satu titik dengan memancarkan gelombang cahaya tampak sampai dipantulkan kembali oleh objek yang dipetakan, kemudian diterima oleh alat sehingga alat dapat menentukan waktu tempuh gelombang dari mulai dipancarkan sampai diterima kembali. Secara sederhana penghitungan jarak dengan metode ini biasa disebut sebagai perhitungan jarak berdasarkan waktu tempuh gelombang yang dipancarkan atau berdasarkan Time-ofFlight (TOF). Persamaan matematis untuk menghitung jarak dengan menggunakan laser ditunjukkan pada Persamaan dibawah ini (Shan dan Toth, 2009).
\[R = v.t/2 \tag{1}\]
dimana
R : jarak (m)
v : kecepatan rambat gelombang (3x108 m/s) t : waktu tempuh gelombang yang terukur (s)
Kecepatan rambat gelombang cahaya tampak di udara telah diketahui sebesar 299.792.458 m/detik atau sekitar 3x108 m/s sehingga ketelitian jarak yang didapat ditentukan oleh ketelitian pengukuran waktu, akibatnya setiap alat yang menggunakan laser untuk menentukan jarak dilengkapi dengan penghitung waktu yang sangat akurat, karena untuk mendapatkan ketelitain jarak 1 mm dibutuhkan alat yang dapat mengukur waktu tempuh sampai 3.33 piko-detik atau 3x10-12
detik (Quintero dkk., 2008). Ilustrasi pengukuran jarak titik B terhadap titik A dengan menggunakan laser ditunjukkan pada Gambar 4.
Gambar 4 Konsep pengukuran jarak menggunakan laser (Shan dan Toth, 2009)
2.3 Akuisisi Data
Akuisisi TLS jembatan Cisomang melibatkan 54 data scan yang memiliki ukuran data sebesar 22 GB, jumlah semua point clouds adalah 361.183.804. Untuk memastikan pengukuran TLS yang dilakukan, terdapat data pembanding yaitu data pengukuran dengan ETS yang diukur pada bulan Januari 2017.
2.4 Pengolahan Data
2.4.1 Registrasi
Registrasi merupakan tahapan paling awal untuk mengabungkan point clouds hasil pemindaian dari semua station. Penggabungan ini dilakukan dengan tujuan untuk mendapatkan data point clouds secara utuh dari objek yang dipindai dengan sistem koordinat yang seragam.
2.4.2 Georeferensi
Georeferensi adalah proses pemberian koordinat pada semua point clouds hasil pemindaian permukaan jembatan Cisomang. Pada pemindaian data terdapat 12 scan data yang memiliki koordinat yang tersebar. Dari referensi koordinat tersebut dilakukan transformasi koordinat, yaitu transformasi (perubahan) suatu sistem koordinat ke sistem koordinat yang lain. Transformasi koordinat umumnya digunakan untuk merubah model ke sistem koordinat peta tertentu.
2.4.3 Filtering
Filtering merupakan merupakan proses lanjutan yang dilakukan setelah melakukan proses registrasi. Proses filtering dilakukan untuk memilah antara
point clouds yang ingin dipertahankan dan point clouds yang ingin dihilangkan. Point clouds yang ingin dihilangkan disebut dengan noise atau derau. Derau ini berupa point clouds yang membentuk objek-objek lain selain objek pengukuran, misalnya pohon, manusia, mobil, dan lainlain. Pada penelitian ini, pemindaian yang dilakukan bertujuan untuk menghasilkan detail permukaan jembatan Cisomang, sehingga objek-objek lain yang bukan merupakan bagian dari objek jembatan Cisomang, akan dianggap sebagai derau. Derau-derau yang terdapat pada pemindaian jembatan Cisomang, meliputi jeruji besi, pohon, ranting dan daun, serta manusia. Kualitas filtering yang dihasilkan bergantung pada kecermatan dari user dalam melakukan filtering. Jumlah point clouds sesudah proses filtering adalah 143.369.603 titik.
2.4.4 Meshing
Meshing merupakan proses pemodelan tiga dimensi. Meshing merupakan keseluruhan proses dalam upaya mengubah data point clouds hasil pemindaian menjadi bentuk yang solid agar menyerupai bentuk asli dari objek yang dipindai. Prinsip kerja proses ini adalah dengan menghubungkan antar titik yang terdapat dalam data point clouds sehingga membentuk Triangulated Irregular Network (TIN).
3 Hasil dan Pembahasan
3.1 Model Tiga Dimensi Jembatan Cisomang
Seteleh melalui pengolahan data, dihasilkan model tiga dimensi jembatan Cisomang beserta dengan model topografinya. Dengan demikian dilakukan analisis geometri untuk memastikan hasil ukuran ukuran TLS terhadap peta topografi yang diukur dengan ETS dan untuk mengetahui besarnya deformasi yang terjadi pada struktur jembatan.
3.1.1 Model Tiga Dimensi Jembatan dan Topografi
Setelah melalui tahap meshing terbentuklah model tiga dimensi jembatan Cisomang yaitu pada Gambar 5. Dari model tersebut akan dilakukan analisis berupa jarak, kemiringan, rotasi dan juga korelasi perbedaan ukuran dengan bentuk fisik ukuran jembatan.
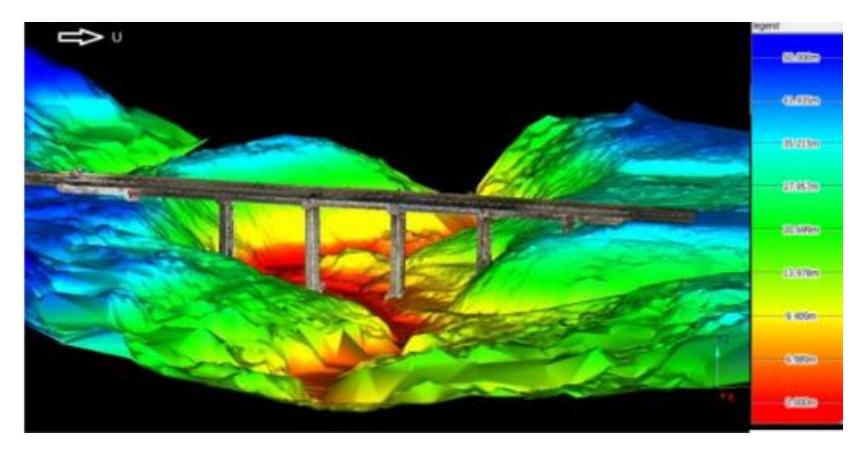
Gambar 5 Model tiga dimensi jembatan Cisomang dan topografi dari samping
3.1.2 Ukuran Jarak Model Tiga Dimensi Jembatan Cisomang
Dari model tiga dimensi jembatan Cisomang dilakukan pengukuran ulang pada perangkat lunak MAPTEK, dengan cara menarik garis pada bagian struktur jembatan Cisomang, kemudian didentifikasi dari pergerakan pada pier jembatan, sehingga dilakukan pengukuran jarak antar pier jembatan. Ada 8 pier jembatan yang diukur pada bagian ini yaitu pier P1 terhadap P2, pier P2 terhadap P3, pier P3 terhadap P4 pada Tabel 1. Adapun hasil pengukuran jarak pada jembatan Cisomang adalah sebagai berikut:
| Tabel 1 Jarak antara pier |
|---|
| Hasil Ukuran | Jarak (m) |
| P2A-P2B Atas | 10,82 |
| P2A-P2B Bawah | 10,727 |
| P3A-P3B Atas | 10,758 |
| P3A-P3B Bawah | 10,714 |
| P2A-P3A Atas | 35,559 |
| P2A-P3A Bawah | 34,906 |
| P2B-P3B Atas | 35,595 |
| P2B-P3B Bawah | 34,993 |
| P1A-P1B Atas | 10.7 |
| P1A-P1B Bawah | 10,746 |
| P2A-P2B Atas | 10,82 |
| D2 A D2D Dawel | 10.727 |
| P1A-P2A Atas | 35,6 |
| P1A-P2A Bawah | 35,596 |
| P1B-P2B Atas | 35,664 |
| P1B-P2B Bawah | 35,635 |
| P3A-P3B Atas | 10,758 |
| P3A-P3B Bawah | 10,714 |
| P4A-P4B Atas | 10,76 |
| P4A-P4B Bawah | 10,736 |
| P3A-P4A Atas | 35,647 |
| P3A-P4A Bawah | 35,591 |
| P3B-P4B Atas | 35,617 |
| P3B-P4B Bawah | 35,637 |
3.1.3 Ukuran Sudut pada Model Tiga Dimensi Jembatan Cisomang
Dari model tiga dimensi jembatan Cisomang dilakukan pengukuran ulang pada perangkat lunak MAPTEK, dengan cara mengukur perbedaan sudut pada setiap ujung objek pada bagian struktur jembatan Cisomang, diidentifikasi melakukan pergerakan adalah pier jembatan, sehingga dilakukan pengukuran sudut antar
tiang jembatan. Ada 7 pier jembatan yang diukur pada bagian ini yaitu pier P1A, P1B, P2A, P2B, P3A, dan P3B. Cara yang digunakan adalah dengan cara membuat multiloop pada model tiga dimensi pier jembatan (Gambar 6) pada setiap 25 cm permukaan. Bagian atas dan bawah multiloop dibandingkan dengan tools geometri pada Maptek.
Gambar 6 Model 3D pier jembatan multiloop pier
3.1.4 Perubahan Jarak antara Pier Jembatan Cisomang
Pada bagian ini kita akan melihat perbandingan ukuran pengukuran TLS dengan data pembanding yaitu data plan, ABD dan topografi. Pada data ukuran plan dan ABD jarak antara pier A dan pier B pada bagian atas dan bawah adalah sama, berbeda dengan hasil ukuran ETS dan TLS yang dilakukan pada tahun 2017. Berikut adalah tabel ukuran pier P2 terhadap P3 pada Tabel 2 dan digambarkan pada Gambar 7.
| Sumber | Tahun Pembuatan | P2A- P2B Atas (m) | P2A- P2B Bawah (m) | P3A-P3B Atas (m) | P3A-P3B Bawah (m) | P2A- P3A Atas (m) | P2A-P3A Bawah (m) | P2B-P3B Atas (m) | P2B-P3B Bawah (m) |
|---|---|---|---|---|---|---|---|---|---|
| Plan (ETS) | 2004 | 10,7 | 10,7 | 10,7 | 10,7 | 35,6 | 35,6 | 35,6 | 35,6 |
| ABD (ETS) | 2005 | 10,7 | 10,7 | 10,7 | 10,7 | 35,6 | 35,6 | 35,6 | 35,6 |
| Topografi (ETS) | 2017 | 10,7 | 10,7 | 10,7 | 10,7 | 35 | 35 | 35,21 | 35,21 |
| TLS | 2017 | 10,82 | 10,727 | 10,758 | 10,714 | 35,559 | 34,906 | 35,595 | 34,993 |
Tabel 2 Perbandingan ukuran pier P2 terhadap P3
Gambar 7 Visualisasi ukuran pier P2 terhadap P3
3.1.5 Rotasi Tiang Jembatan Cisomang
Ukuran sudut bagian atas dan bawah pierjembatan diketahui pada ABD jembatan dianggap tidak mengalami kemiringan. Berbeda dengan hasil ukuran dengan TLS yang menampilkan ukuran geometris tiga dimensi sehingga dapat mengamati rotasi yang terjadi antara bagian atas dan bahwa pada setiap pier jembatan Cisomang. Kemiringan pada pier jembatan menyebabkan perbedaan ukuran jarak antar pier, sehingga terjadi pergeseran struktur.
Gambar 8 Rotasi pier P2
4 Kesimpulan
Dari keseluruhan proses yang telah dilakukan pada penelitian ini dapat ditarik kesimpulan sebagai berikut:
- 1. Model 3D Jembatan Cisomang dapat dihasilkan melalui serangkaian proses akuisisi data yang dilakukan menggunakan metode Terrestrial Laser Scanner (TLS) pada tanggal 13 – 15 Januari 2017 menghasilkan 54 data scan, yaitu sebnayak 361.183.804 point clouds. Proses pengolahan data menggunakan perangkat lunak Maptek i-site yang mendukung untuk melakukan proses registrasi, georeferensi, filtering dan meshing.
- 2. Terbentuknya model 3D Jembatan Cisomang dari point clouds pengukuran TLS memiliki eror registrasi rata-rata sebesar 2 cm dan memiliki perbandingan ukuran dengan hasil pengukuran ETS sebesar 0 sampai dengan 10 cm.
- 3. Terdapat perbedaan ukuran TLS dengan ukuran As Built Drawing (ABD) yang besar membuktikan terjadinya deformasi pada struktur jembatan, yaitu jarak antara pier P2 dan P3 memiliki perbedaan 69,4 cm dan pada pier P2A bagian timur terjadi rotasi sebesar 0°53'23".
4.1 Daftar Pustaka
- [1] Barker, R.M., dan Puckett, J.A. (1997), Design of Highway Bridge-Based on AASHTO LRFD Bridge Design Specifications, A WilwyInterscience Publication, Jhon Wiley & Sons
- [2] Reshetyuk, Y. (2009). Self-Calibration and Direct Georeferencing in Terrestrial Laser Scanner. Stockholm: Royal Institute of Technology.
- [3] Ruther, H., Held, C., Burtha, R., Schroder, R., & Wessels, S. (2009). Challenges in Herritage Documents with Terrestrial Laser Scanning. Cape Town.
- [4] Staiger, R.: Laser Scanning in an Industrial Environment. FIG Congress, Washington, D.C. USA, April, 2003.