
1 Pendahuluan
Wilayah Negara Kesatuan Republik Indonesia merupakan negara kepulauan terbesar di dunia, Indonesia dikenal pula sebagai negara maritim. Kondisi ini merupakan anugerah yang besar bagi Indonesia dimana wilayah darat dan laut tersimpan kekayaan alam yang sangat melimpah sehingga perlu suatu upaya untuk mengelola hal tersebut. Oleh sebab itu, Pemerintah Republik Indonesia mengeluarkan Undang-Undang Nomor 26 Tahun 2007 tentang Penataan Ruang dan Undang-Undang Nomor 27 Tahun 2007 tentang Pengelolaan Wilayah Pesisir dan Pulau-Pulau Kecil untuk merencanakan pengelolaan wilayah Negara Indonesia.
| Received, Revised, Accepted for publication |
|---|
Tujuan Kegiatan penataan ruang dan pengelolaan wilayah pesisir dan pulaupulau kecil tidak akan terlepas dari penggunaan peta. Peta sangat berguna sebagai model rencana pengelolaan wilayah secara spasial. Peta Rencana Tata Ruang Wilayah (RTRW) berfungsi sebagai acuan untuk pengelolaan di wilayah darat dan Peta Rencana Zonasi Wilayah Pesisir dan Pulau-Pulau Kecil (RZWP3K) berfungsi sebagai acuan pengelolaan di wilayah pesisir dan laut. Peta dasar yang digunakan untuk RTRW adalah Peta Rupa Bumi Indonesia (RBI) dan Peta RZWP3K menggunakan Peta Laut Lingkungan Pantai Indonesia (LPI) dan Lingkungan Laut Nasional (LLN).
Tujuan dari penelitian ini adalah untuk membuat model peta yang terintegrasi untuk keperluan pelaksanaan Rencana Tata Ruang Wilayah (RTRW) dan Rencana Zonasi Wilayah Pesisir dan Pulau-Pulau Kecil (RZWP3K) dengan menggunakan data Peta Rupa Bumi Indonesia (RBI) dan Peta Laut Lingkungan Pantai Indonesia (LPI) dan Lingkungan Laut Nasional (LLN).
2 Metode dan Data
Kondisi data pasut hasil pengamatan masih terdapat data yang kosong di dalamnya. Karena tidak di setiap waktu interval atau di setiap satu jam terdapat datanya, maka perlu dilakukan pembuatan time series dengan interval satu jam terlebih dahulu sebelum melakukan proses analisis harmonik. Hal ini dilakukan karena program yang digunakan untuk melakukan analisis harmonik, dibuat agar dapat menganalisis data pasut tersebut setiap satu jam. Selain melakukan pembuatan time series tersebut, data tersebut juga harus disusun sesuai dengan format dari script matlab yang digunakan. Berikut ini terdapat Tabel 1 dan Tabel 2 yang berisikan contoh data pasut di stasiun pasut Cilacap sebelum dan setelah disusun sesuai format yang dibutuhkan.
| Tanggal | Jam | Kedudukan Muka Laut (cm) | ||
|---|---|---|---|---|
| 15/05/2014 | 1:00:00 | 226 | ||
| 15/05/2014 | 2:00:00 | 226 | ||
| 15/05/2014 | 3:00:00 | 211 | ||
| 15/05/2014 | 4:00:00 | 178 | ||
Tabel 1 Data Pasut belum sesuai format
Tahun Bulan Hari Jam Menit Detik Kedudukan Muka Laut (m) 2014 5 15 1 0 0 2.26 2014 5 15 2 0 0 2.26 2014 5 15 3 0 0 2.11 2014 5 15 4 0 0 1.78 2014 5 15 5 0 0 1.36 2014 5 15 6 0 0 NaN 2014 5 15 7 0 0 0.71 2014 5 15 8 0 0 0.62 2014 5 15 9 0 0 0.7 2014 5 15 10 0 0 NaN 2014 5 15 11 0 0 1.22
Tabel 2 Data pasut sesuai format
Pada Tabel 2 terlihat pada tanggal 15 Mei 2014 pukul 06:00 dan 10:00 nampak tidak ada datanya, untuk kasus seperti itu maka diisi dengan NaN (Not a Number) pada time series yang telah dibuat. Setelah format data sesuai dengan yang dibutuhkan, barulah data pasut tersebut dapat digunakan untuk analisis harmonik. Variasi kedudukan muka air laut di suatu lokasi merupakan resultan dari jarak dan kedudukan bulan serta matahari terhadap bumi yang selalu berubah secara periodik. Fenomena tersebut dinyatakan dengan superposisi dari gelombang penyusun pasut (komponen-komponen pasut) yang bersifat periodik. Oleh karena gelombang-gelombang pasut tersebut bersifat periodik maka variasi kedudukan muka laut dapat dimodelkan dengan persamaan sinusoidal. Analisis harmonik pasut adalah suatu metode yang dilakukan untuk mendapatkan konstantakonstanta (amplitudo dan fase) dari komponen-komponen pasut. Tujuan analisis harmonik pasut adalah menghitung amplitudo hasil respon dari kondisi laut setempat terhadap pasut setimbang dan beda fase dari gelombang tiap komponen di tempat itu terhadap keadaan pasut setimbangnya (Ali, dkk, 1994). Pasut setimbang atau equilibrium tide merupakan pasut semu yang terjadi di permukaan laut, dimana setiap saat seluruh permukaan bumi memiliki potensial gravitasi yang konstan dan sama besar (Ali, dkk, 1994). Oleh karena itu, apabila konstanta pasut telah didapat, maka kedudukan muka laut di suatu tempat dan di suatu waktu dapat diketahui. Konstanta pasut (amplitudo dan fase) dapat ditentukan menggunakan persamaan harmonik berikut [Djunarsjah, 2014]:
\[h(t_i) = Co + \sum_{j=1}^{m} a_j f_j \cos(\omega_j t_i + v_j - g_j)\] \[\tag{1}\] dengan Co = kedudukan MSL diatas datum yang digunakan, α= konstanta amplitudo, ω= kecepatan sudut, t = waktu, g = fase awal komponen pasang surut (saat t = 0), h(t) = kedudukan muka air laut saat t, f = faktor koreksi nodal untuk amplitudo, v = faktor koreksi pasut setimbang untuk fase, m = jumlah komponen pasut.
Menurut Teori Laplace, gelombang komponen pasut setimbang akan mendapat respon dari laut yang dilewati selama penajalarannya, maka dari itu amplitudo gelombang komponen tersebut akan mengalami perubahan, serta fasenya akan mengalami keterlambatan, namun frekuensi (kecepatan sudut) masing-masing komponen tidak mengalami perubahan, sehingga kecepatan sudut dapat dianggap tetap. Oleh karena itu, pada persamaan tersebut, parameter yang akan ditentukan nilainya adalah kedudukan muka air laut (Co), amplitudo (aj), dan fase (gj) dari data pengamatan. Dengan menggunakan metode hitung perataan parameter seperti yang telah dijelaskan di atas, maka parameter-parameter tersebut dapat ditentukan nilainya.
Pada peneltian ini, analisis harmonik pasut serta prediksi pasut dilakukan dengan menggunakan software t_tide. T_tide merupakan suatu program untuk melakukan analisis harmonik pasut dengan koreksi nodal, kesimpulan (inference), dan pilihan-pilihan lain sesuai dengan kebutuhan penggunanya. Konstanta pasut hasil analisis harmonik dapat digunakan untuk melakukan prediksi pasut. T_tide pertama kali dibuat oleh Mike G.G. Foreman dalam bahasa fortran. Kemudian, S. Lentz dan B. Beardsley mengkonversi bahasa yang digunakan dalam t_tide yaitu bahasa fortran ke dalam bahasa matlab. Setelah menggunakan bahasa matlab, kemudian R. Pawlowicz melengkapi t_tide dengan menambahkan perhitungan yang kompleks. T_tide sendiri merupakan aplikasi yang didalamnya terdapat program-program (mfiles) untuk mengolah data pasut seperti t_tide.m, t_predic.m, t_getcons.m, t_errors.m, dan lainnya.
Prediksi pasut dilakukan dengan menurunkan atau mencari komponen-komponen pasut dari data pasut dengan rentang pengamatan tertentu (Poerbandono & Djunarsjah, 2005). LAT merupakan kedudukan muka laut terendah yang terjadi di bawah kondisi meteorologis rata-rata dan merupakan hasil kombinasi pengaruh astronomis sedangkan HAT yang tertinggi (IHO, 1993).
Kombinasi pengaruh astronomis merupakan akibat dari gaya tarik-menarik antara bumi dengan benda-benda astronomis lainnya terutama bulan dan matahari. Kedudukan muka laut hasil prediksi selama 18,6 tahun secara teori telah merepresentasikan kombinasi semua komponen pasut periode pendek maupun
periode panjang (Emery & Aubrey, 1981). Namun, nilai LAT juga tergantung pada tahun penelitian, periode waktu penelitian, serta lokasi dan kalibrasi yang tepat dari alat pengamat pasut yang digunakan (UKHO, 2000). Zo merupakan kedudukan suatu muka laut terhadap kedudukan muka laut rata-rata (MSL). Gambar 1 menampilkan kedudukan LAT dan HAT terhadap MSL (Zo LAT & Zo HAT).
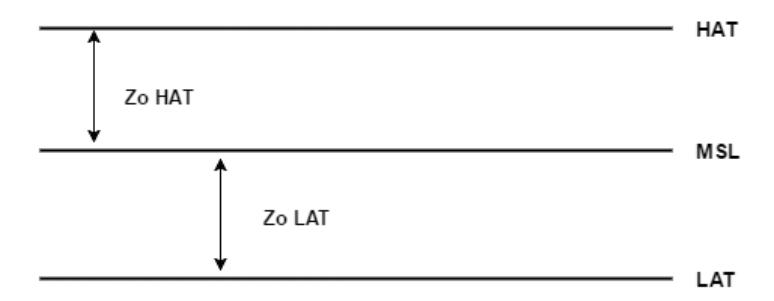
Gambar 1 Kedudukan LAT dan HAT terhadap MSL
Berdasarkan ilustrasi Gambar 1, maka Zo dapat ditentukan dengan persamaan berikut.
\[ZO HAT = HMSL + HHAT\] (2)
\[ZO LAT = HMSL - HLAT\] (3)
dengan:
ZO HAT = kedudukan HAT terhadap MSL ZO LAT = kedudukan LAT terhadap MSL HMSL = kedudukan LAT terhadap MSL
HMLWS = kedudukan HAT terhadap nol alat pengamatan HLAT = kedudukan LAT terhadap nol alat pengamatan
Maka dengan begitu, selisih kedudukan vertikal antara HAT dan LAT terhadap MSL ∆Z dapat ditentukan melalui:
\[\Delta Z = Zo HAT - Zo LAT \tag{4}\]
Kemiringan pantai dari tiga lokasi stasiun pengamatan pasut ditentukan menggunakan data kedalaman disekitar pantai Cilacap, data kedalaman tersebut juga dilengkapi dengan posisi horizontalnya. Data tersebut diperoleh dari Peta LPI dengan skala 1:25.000 untuk wilayah stasiun pasut Cilacap. Data kedalaman beserta posisi horizontalnya tersebut, kemudian digunakan untuk melakukan
interpolasi sehingga menghasilkan DEM (Digital Elevation Model). Setelah DEM terbentuk, maka antar titik satu dengan yang lainnya dapat ditentukan perbedaan horizontal serta vertikalnya. Sehingga, kemiringan dari titik satu dengan yang lainnya tersebut dapat terbentuk. Gambar 2 menampilkan hubungan geometrik antara perbedaan tinggi dan perbedaan posisi horizontal dengan kemiringannya.
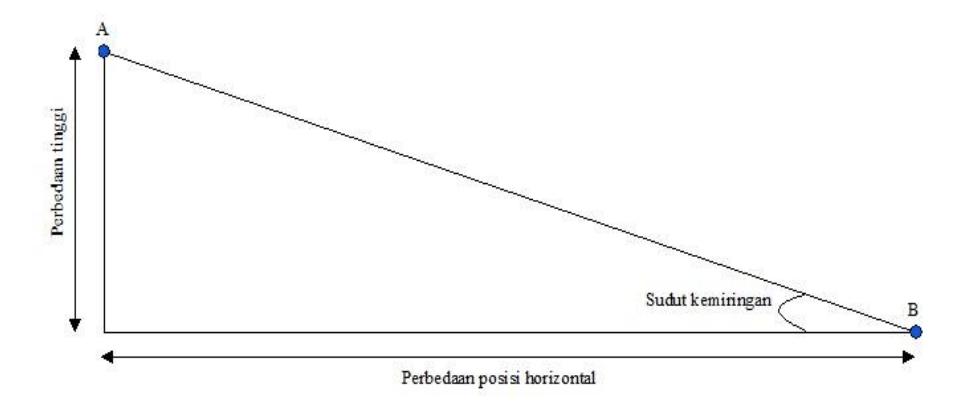
Gambar 2 Hubungan geometri titik A dan B
Berdasarkan Gambar 2 maka kemiringan dari dua titik tersebut (A dan B) dapat ditentukan melalui persamaan berikut.
Sudut kemiringan = \[tan^{-1} \left( \frac{perbedaan tinggi}{perbedaan posisi horizontal} \right)\] (5)
Perbedaan kedudukan vertikal LAT dan HAT tentunya akan memberikan pengaruh terhadap posisi titik dasar. Saat posisi titik dasar tersebut mengalami perubahan atau pergeseran, maka akan mengakibatkan pergeseran pada garis pantai pula, hal tersebut karena garis pantai sendiri ditentukan berdasarkan titik dasar. Lebar pergeseran tersebut dapat diketahui dengan menggunakan data kemiringan pantai serta selisih kedudukan vertikal antara HAT, MSL, dan LAT Hubungan geometri antara kemiringan pantai serta selisih kedudukan vertikal antara HAT, MSL, dan LAT dalam menentukan lebar pergeseran titik dasar dapat dilihat pada Gambar berikut.
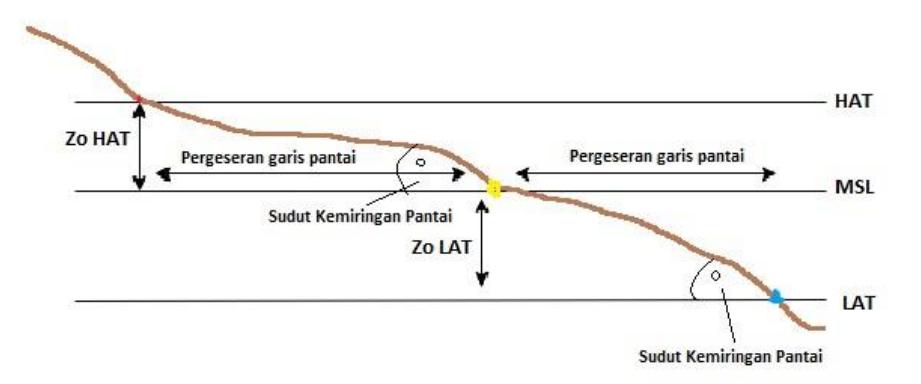
Gambar 3 Hubungan geometri antara kemiringan pantai dan selisih kedudukan vertikal LAT dan HAT terhadap MSL
Berdasarkan Gambar 3 di atas, maka lebar pergeseran garis pangkal dapat ditentukan menggunakan persamaan berikut:
\[x = \Delta z / \tan \theta \tag{6}\] dengan ∆Z = perbedaan kedudukan vertikal dan θ = sudut kemiringan pantai.
3 Hasil dan Pembahasan
Hasil dari analisis harmonik pasut yang telah dilakukan adalah berupa komponenkomponen pasut beserta ketelitiannya. Contoh dari komponen-komponen pasut yang dihasilkan adalah seperti yang ditampilkan pada Tabel 3 berikut.
Table 3 Komponen pasut di stasiun pasut Cilacap
| Component | Frequency | Amplitude | Amplitude Error | Phase | Phase Error | SNR |
|---|---|---|---|---|---|---|
| *SA | 0.0001141 | 0.1427 | 0.036 | 59.2 | 15.39 | 15 |
| *SSA | 0.0002282 | 0.1004 | 0.036 | 179 | 19.54 | 7.6 |
| *MSM | 0.0013098 | 0.0152 | 0.029 | 277 | 139.07 | 0.27 |
| *MM | 0.0015122 | 0.0087 | 0.026 | 98.4 | 188.65 | 0.11 |
| *MSF | 0.0028219 | 0.0104 | 0.026 | 251 | 150.49 | 0.16 |
| *MF | 0.0030501 | 0.0036 | 0.024 | 324 | 225.29 | 0.023 |
Prediksi pasut yang dilakukan dengan menggunakan menggunakan T_Tide yang dijalankan dengan Matlab R2013a serta masukan berupa komponen pasut hasil analisis harmonik, akan menghasilkan kedudukan muka laut selama 18,6 tahun. Berikut adalah kedudukan muka laut hasil prediksi.
a. Kedudukan Muka Laut Terendah di Setiap Tahunnya di Wilayah Stasiun Pasut Cilacap Hasil Prediksi. Gambar 4 memvisualisasikan kedudukan muka laut terendah di setiap tahunnya selama 18,6 tahun.
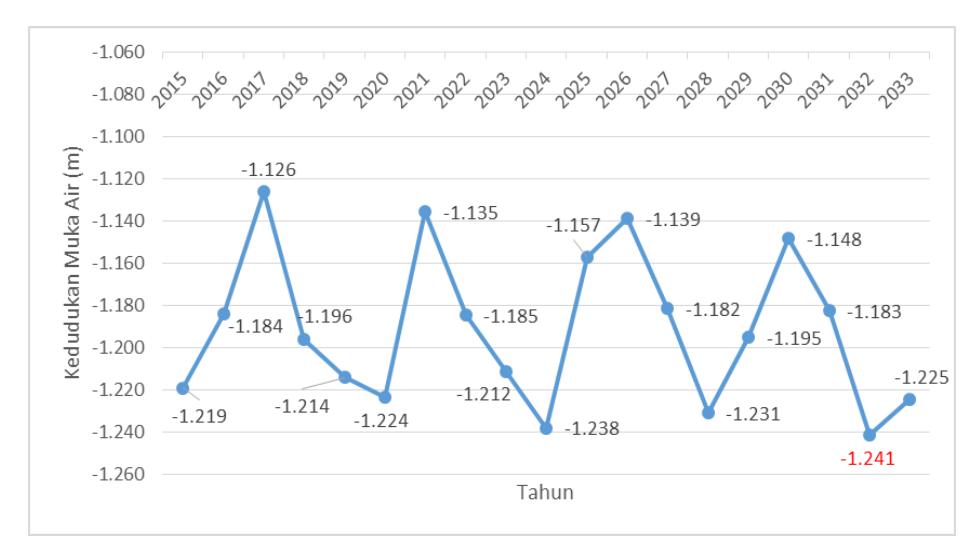
Gambar 4 Kedudukan prediksi muka laut terendah
Pada Gambar 4 terlihat bahwa kedudukan muka laut terendah selama 18,6 tahun adalah senilai -1,241 m terhadap MSL. Sehingga, nilai LAT di wilayah stasiun pasut Cilacap pada jangka waktu tersebut adalah -1,241 m.
b. Kedudukan Muka Laut Tertinggi di Setiap Tahunnya di Wilayah Stasiun Pasut Cilacap Hasil Prediksi. Gambar 3.2 memperlihatkan kedudukan muka laut tertinggi di setiap tahunnya selama 18,6 tahun.
Pada Gambar 5 terlihat bahwa kedudukan muka laut tertinggi selama 18,6 tahun adalah senilai 1,200 m terhadap MSL. Sehingga, HAT di wilayah stasiun pasut Cilacap pada jangka waktu tersebut adalah 1,200 m, sehingga selisih vertikal antara HAT dan LAT yang sesuai dengan persamaan (4) adalah 2,441 m.
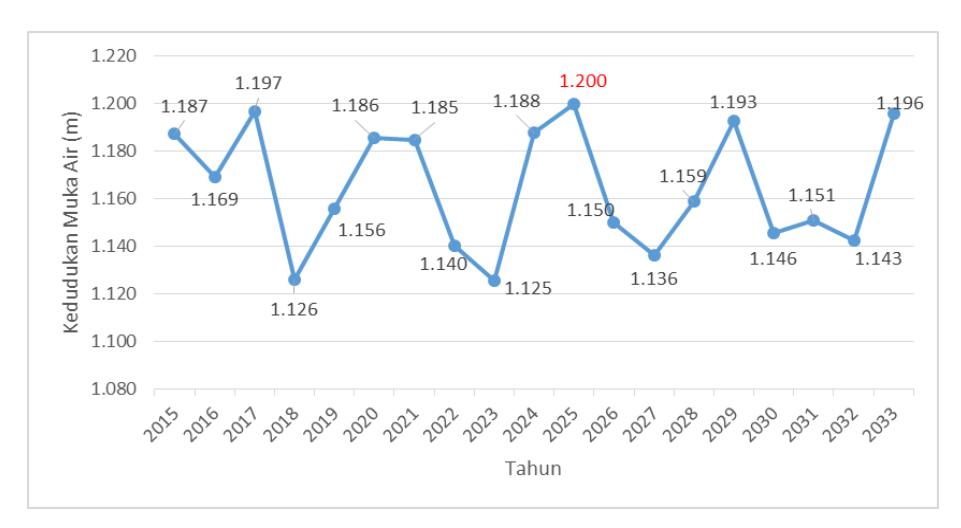
Gambar 5 Kedudukan prediksi muka laut tertinggi
Kenampakan kemiringan pantai di wilayah Cilacap ditampilkan dalam Gambar 6.
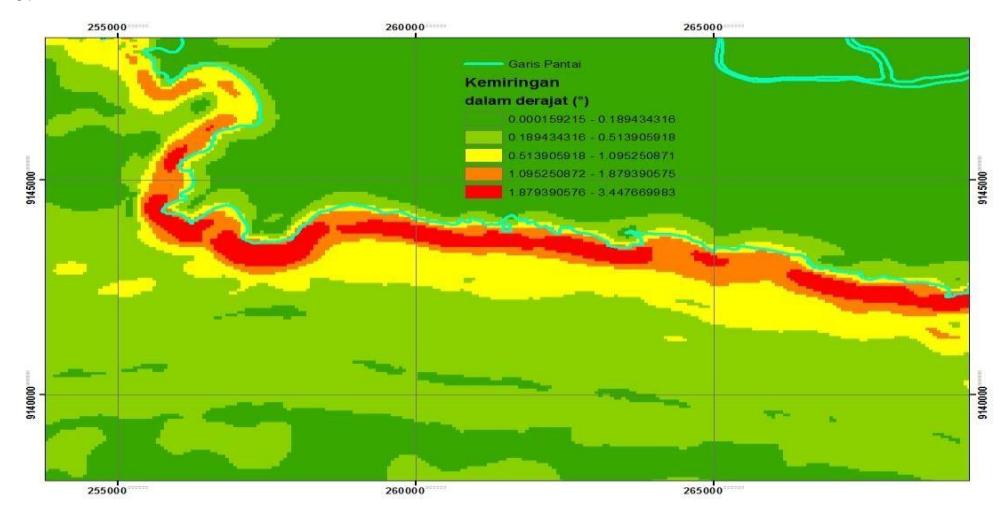
Gambar 6 Kemiringan pantai di wilayah Cilacap
Gambar 6 tersebut kemudian diinterpretasi dengan berdasarkan letak garis pantai pada kemiringan pantai dan dirata-rata nilainya, maka nilai kemiringan rata-rata pantai di wilayah Cilacap adalah 0,882°.
3.1 Hasil Pergeseran Garis Pantai
Pergeseran garis pantai dapat ditentukan melalui persamaan (6) jika data kemiringan dan Zo HAT diketahui, maka menghasilkan nilai pergeseran sebesar 77,9473 m. Pergeseran garis pantai MSL ke HAT hasil digitasi dapat dilihat pada gambar berikut.
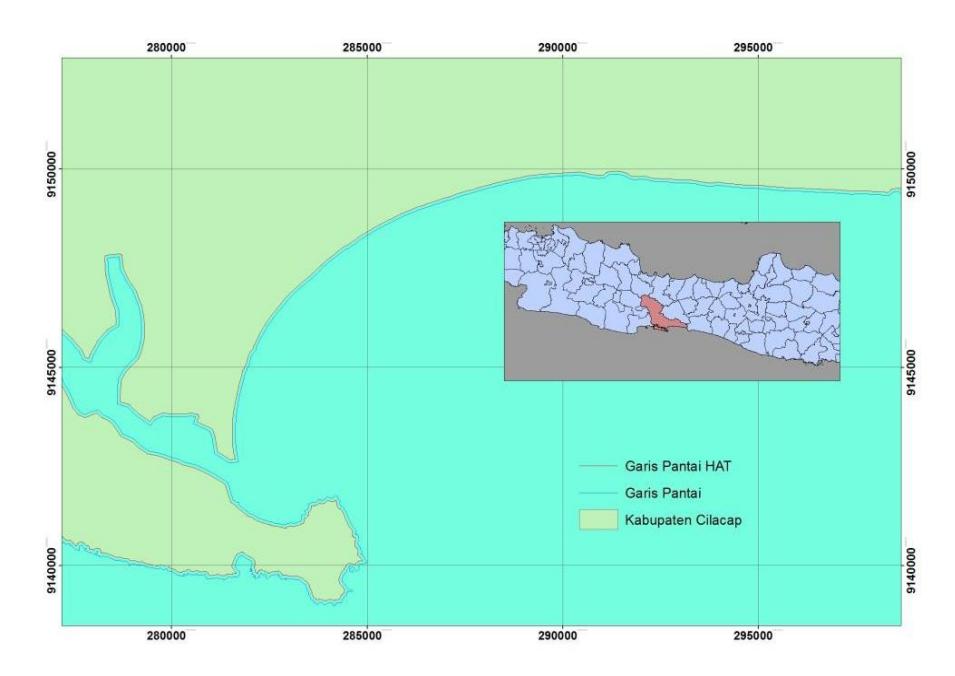
Gambar 7 Pergeseran Garis Pantai
4 Kesimpulan dan Saran
4.1 Kesimpulan
Kesimpulan dari penelitian ini menjelaskan bahwa untuk membuat model peta yang terintegrasi untuk keperluan pelaksanaan Rencana Tata Ruang Wilayah (RTRW) dan Rencana Zonasi Wilayah Pesisir dan Pulau-Pulau Kecil (RZWP3K) dengan menggunakan data yang beda datum vertikalnya dan analisis harmonik pasut menggunakan aplikasi T_Tide dengan data pasut di Cilacap, penentuan HAT dan LAT, serta penentuan pergeseran garis pangkal yang dihasilkan menggunakan Peta LPI dan LLN di wilayah tersebut. LAT memiliki kedudukan nilai -1,241 sedangkan HAT memiliki kedudukan 1,200 terhadap MSL. Wilayah pantai di Cilacap memiliki kemiringan rata-rata sebesar 0,882° sehingga pergeseran garis pantai untuk penyatuan datum vertikal peta ke HAT adalah 77,9473 m.
Berdasarkan hasil penelitian, sebaiknya penelitian ini dilanjutkan dengan kerjasama instansi daerah dalam penyusunan peta perencanaan pengelolaan laut dan langsung survei garis pantai secara real-time.
5 Daftar Pustaka
- [1] Direktorat Tata Ruang Pesisir dan Pulau-Pulau Kecil. 2013. Pedoman Teknis Penyusunan RZWP-3-K (Rencana Zonasi Wilayah Pesisir dan Pulau-Pulau Kecil Kabupaten/Kota.Jakarta: Kementrian Kelautan dan Perikanan RI.
- [2] Djunarsjah, E. (2006). Tingkat Signifikansi Penerapan Prediksi Pasut Astronomis Terendah Dalam Menetapkan Lokasi Titik-Titik Garis Pangkal untuk Penarikan Batas Laut Teritorial dan Bagian Laut Lainnya di Indonesia.
- [3] Djunarsjah, E. (2014). Analisis Pasut Metode Kuadrat Terkecil.
- [4] Pawlowicz, R., Beardsley, B., Lentz, S. (2002). Classical tidal harmonic analysis including error etimates in MATLAB using T_Tide.
- [5] Pemerintah Republik Indonesia. 2007. Undang-Undang No. 26 Tahun 2007 tentang
- [6] Penataan Ruang. Lembaran Negara RI Tahun 2007, No. 68. Sekretariat Negara. Jakarta.
- [7] Pemerintah Republik Indonesia. 2007. Undang-Undang No. 27 Tahun 2007 tentang Pengelolaan Wilayah Pesisir dan Pulau-Pulau Kecil. Lembaran Negara RI Tahun 2007, No. 84. Sekretariat Negara. Jakarta.
- [8] Poerbandono dan Djunarsjah, E. (2005). Survei Hidrografi. PT Refika Aditama. Bandung.