
2 Metodologi
2.1 Data dan Wilayah Penelitian
Data yang digunakan dalam penelitian ini adalah data kontinu GPS Bakosurtanal tahun 2008 -2010, data radiosonde Bakosurtanal tanggal 28 Juli -01 Agustus 2010, data radiosonde stasiun Cengkareng Surabaya tahun 2008 2010 http://weather.uwyo.edu, dan data model global atmosfer NCEP tahun 2008 - 2010 http://www.esrl.noaa.gov/psd/, data ZPD (Zenith Path Delay) IGS stasiun darw dan bako tahun 2008 - 2010 dari ftp://cddis.gsfc.nasa.gov.
Distribusi stasiun GPS, stasiun radiosonde dan grid NCEP dapat dilihat pada Gambar 1.
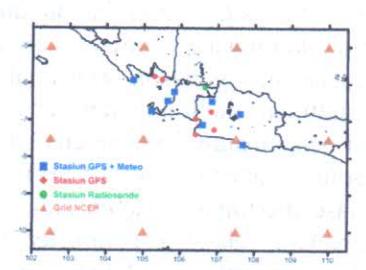
Gambar 1 Distribusi stasiun kontinu GPS, stasiun radiosonde, dan grid NCEP.
2.2 Penentuan ZHD dan ZNHD dari Data Profil Vetikal Atmosfer
Profil vertikal atmosfer dapat diperoleh dari peluncuran radiosonde dan model global atmosfer. Informasi parameter meteorologi sepanjang lintasan vertikal dapat digunakan untuk penentuan delay troposfer, yaitu dengan menghitung integral parameter meteorologi sepanjang lintasan. Adapun informasi yang digunakan untuk menghitung delay troposfer antara lain suhu, tekanan, kelembaban dan tinggi geopotensial. ZTD dapat ditentukan dengan mengintegralkan refraktifitas troposfer dalam setiap layer, yang kemudian dapat diuraikan menjadi ZHD dan ZNHD seperti terlihat pada persamaan (1) dan (2).
\[ZHD = 10^{-6} \sum_{ii} k_1 R_d \rho_{t_{ii}} \Delta h_{ii}\] (1)
\[ZHD = 10^{-6} \sum_{il} k_1 R_d \rho_{t_{il}} \Delta h_{il}\] \[ZNHD = 10^{-6} \sum_{il} k_3 R_{\nu} \rho_{\nu_{il}} \left(\frac{1}{r_{il}} + k_5\right) \Delta h_{il}\] (1)
Dimana \(k_1\) adalah konstanta refraktifitas yang menunjukkan induksi momen dipole untuk molekul udara kering, k3 adalah konstanta orientasi polarisasi molekul water vapor, \(k_5\) adalah konstanta refraktifitas water vapor (Wijaya, 2010), R<sub>d</sub> adalah konstanta spesifik gas kering, \(R_v\) adalah konstanta spesifik water vapor, \(\rho_{t_{ii}}\) adalah total densitas udara dalam lapisan atmosfer ii, \(\rho_{v_{ii}}\) adalah total densitas water vapor
Susilo, et al.
dalam lapisan atmosfer ii, \(\Delta h_{ii}\) adalah selisih tinggi lapisan atmosfer antara layer, ii adalah layer lapisan atmosfer, \(T_{ii}\) adalah suhu pada layer lapisan atmosfer.
Persamaan (1) dan (2) merupakan persamaan dasar untuk menghitung delay troposfer dari data profil vertikal (radiosonde dan model global atmosfer) [Susilo, 2012].
2.3 Penentuan ZHD dan ZNHD dari Data GPS
ZHD dan ZNHD dari data GPS dapat diekstrak dari ZTD hasil pengolahan data GPS. Pengolahan data GPS untuk menentukan ZTD menggunakan perangkat lunak ilmiah GAMIT 10.4 [King, et.al, 2010]. ZTD diestimasi dari data double difference fase dengan mengasumsikan bahwa komponen kesalahan jam satelit dan jam receiver sudah dieliminir dengan proses pengurangan data, delay ionosfer direduksi dengan menggunakan kombinasi linier, kesalahan orbit direduksi dengan menggunakan orbit final IGS atau di fixed, efek multipath dieliminir dengan menggunakan sudut elevasi pengamatan, jenis antena chokering, dan model absolut antena (igs 05.atx), sedangkan ambiguitas fase diestimasi terlebih dahulu, dan noise receiver diabaikan sehingga parameter yang tersisa adalah jarak geometrik dan STD, yang diestimasi pengolahan bersamaan dalam data. menggunakan fungsi pemetaan Neill (1996), ZTD dapat dihitung menggunakan persamaan berikut:
\[ATDEL(EL) = DRYZEN * DRYMAP(EL) + WETZEN *\] \(WETMAP(EL)\) (3)
dimana EL adalah elevasi satelit GPS, ATDEL adalah delay atmosfer pada arah lintasan satelit GPS, DRYZEN adalah zenith dry delay (ZDD/ZHD), WETZEN adalah zenith wet delay (ZWD/ZNHD), DRYMAP dan WETMAP adalah fungsi pemetaan untuk udara kering (hidrostatik delay) dan udara basah (non-hidrostatik delay). Apriori ZHD dan ZNHD dihitung dari menggunakan model Saastamoinen (1972). Jika tidak ada data pengamatan meteorologi permukaan, apriori untuk tekanan dan suhu diperoleh dari GPT 50 (Global Pressure and Temperature) dari Boehm dan Schuh (2006).
Setelah ZTD diperoleh dari pengolahan data GPS, selanjutnya ZHD dihitung menggunakan persamaan (4) dengan input data tekanan permukaan.
\[ZHD = \frac{0.0022767 \cdot P_0}{1 - 0.00266 \cdot cos2\varphi - 0.00028h} \tag{4}\]
Dimana \(P_0\) adalah tekanan permukaan di stasiun GPS, \(\varphi\) adalah lintang geografis stasiun GPS, h adalah tinggi ellipsoid stasiun GPS dalam km. Sedangkan ZNHD diperoleh menggunakan persamaan (5).
ZNHD = ZTD - ZHD
3 Hasil dan Pembahasan
Hasil dan pembahasan yang dilakukan makalah ini terdiri dari validasi ZTD dengan ZTD validasi ZNHD GPS dengan ZNHD radiosonde NCEP.
3.1 Validasi ZTD
Tujuan validasi nilai ZTD adalah memverifikasi apakah nilai ZTD yang diperole pengolahan data GPS menggunakan metode yang dijelaskan sebelumnya sudah valid/optimal. Validakukan dengan membandingkan nilai ZTD sebelum ya dengan nilai ZTD dari pengolahan data IGS. Hasil validasi ZTD untuk kedastasiun di atas dapat dilihat pada Tabel 1 dar Gambar 2.
Dari Tabel 1 dan Gambar 2 dapat dilihat bahwa nilai rerata bias antara ZTD dan ZPD adalah -1.05 mm dengan rerata std (standar deviasi) dan rerata rms (root mean square) = ~ 7.48 mm dan korelasi = ~ 0.97. Dengan melihat nilai bias, rms dan korelasi antara ZTD dan ZPD maka dapat disimpulkan bahwa ZTD yang dihasilkan dalam penelitian ini memiliki kesesuaian yang tinggi nilai ZPD dari produk IGS Selisih nilai ZTD dan ZPD berkisar ± 5 mm (Gambar 2 (a) dan (b)), hal ini bisa terjadi karena adanya beberapa perbedaan dalam metode pengolahan data GPS (Karabatic, 2011). Perbedaan metode itu antara lain: (i) resolusi estimasi nilai ZTD dalam penelitian ini adalah setiap 1 jam sedangkan resolusi ZPD adalah 5 menit, (ii) parameter orbit dalam penelitian ini di fixed sedangkan IGS ikut diestimasi.
Berdasarkan hasil di atas maka bisa disimpulkan bahwa teknik/metode penentuan ZTD yang digunakan dalam penelitian ini sudah optimal.
(5) 5m
de
THE
Tabel 1 Statistik Validasi ZTD dan ZTD IGS
| Stasiun | Selisih | Regression | ||||||
|---|---|---|---|---|---|---|---|---|
| Bias (mm) | std | rms | Jumlah data | Offset | Koefesien Korelasi | rmse | ||
| bako | 0.06 | 7.95 | 7.95 | 22461 | 80.56 | 0.97 | 6.55 | |
| darw | 2.04 | 7.02 | 7.02 | 15198 | 77.81 | 0.97 | 5.84 | |
| rerata | 1.05 | 7.48 | 7.48 | 79.18 | 0.97 | 6.19 | ||
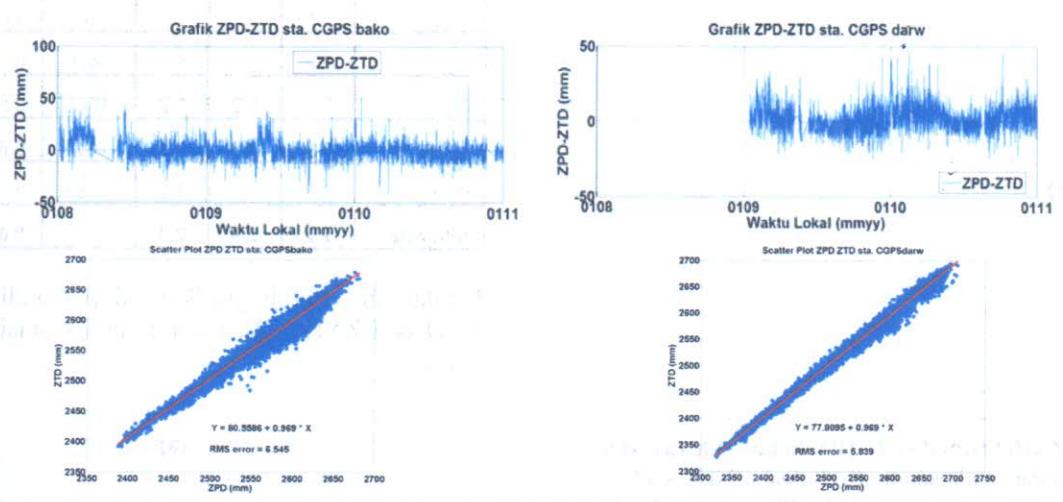
2 Validasi ZTD dan ZTD (ZPD IGS): (a) ZPD-ZTD (bako); (b) ZPD-ZTD (darw); (c) scatter ZPD ZTD (bako); (d) scatter ZPD ZTD (darw).
ZValidasi Nilai ZNHD dengan Data Radiosonde Bakosurtanal
an dalam ZTD IGS. onde, dan ah untuk roleh dari ang telah
Validas
D stasium dari hasil ntuk kedun
d 1 dm
apat dilim D adalah ) dan rema korelasi = an korelasi
Ikan bahwa
ni memili
roduk ICE n (Gambu
ena adamu
olahan dan e itu antum
n penelitum
ZPD admin
litian ini
ntuan Z
maka
optimal
Setelah ZTD sudah divalidasi dengan ZTD S. selanjutnya adalah dihitung ZHD dengan (4). Nilai ZNHD menggunakan persamaan THD GPS dihitung dengan menggunakan model dengan input data meteorologi . Untuk stasiun GPS yang tidak dilengkapi sensor meteorologi, ZHD dihitung dengan merunakan input data tekanan dan suhu dari GPT NHD yang digunakan untuk validasi adalah GPS stasiun bako dengan ZNHD dari data radiosonde di Bakosurtanal. ZNHD sonde dihitung dengan menggunakan persamaan an mengkoreksikan perbedaan tinggi antenna dengan tinggi sensor radiosonde. Hasil validasi GPS dengan ZNHD radiosonde dapat dilihat Gambar 3.
Dari hasil validasi nilai ZNHD GPS dengan Radiosonde, dapat dilihat bahwa ZNHD GPS HD radiosonde memiliki pola yang cenderung (Gambar 3 (a)). Terdapat perbedaan nilai pada lingkaran hitam Gambar 3 (a). Perbedaan kemungkinan terjadi karena pergerakan balon de yang tidak true vertikal, dan sangat dari angin sehingga menghasilkan nilai
ZNHD yang tidak tepat berada di atas stasiun GPS. Akan tetapi, secara keseluruhan nilai ZNHD GPS sudah sesuai dengan nilai ZNHD radiosonde dengan bias = \(\sim\) -7.77 mm, std = \(\sim\) 15.56 mm dan rms = \(\sim\) 15.14 mm. Korelasi ZNHD GPS dan ZNHD radiosonde sangat tinggi yaitu 0.99.
Dari pola dan korelasi ZNHD GPS dan ZNHD radiosonde maka dapat disimpulkan bahwa penentuan ZNHD dari data GPS akan memberikan hasil yang sama dengan ZNHD dari radiosonde, sehingga nilai ZNHD GPS sudah cukup mewakili ZNHD radiosonde. Resolusi ZNHD GPS sangat bagus untuk mempelajari perubahan cuaca/iklim dibandingkan dengan ZNHD radiosonde.
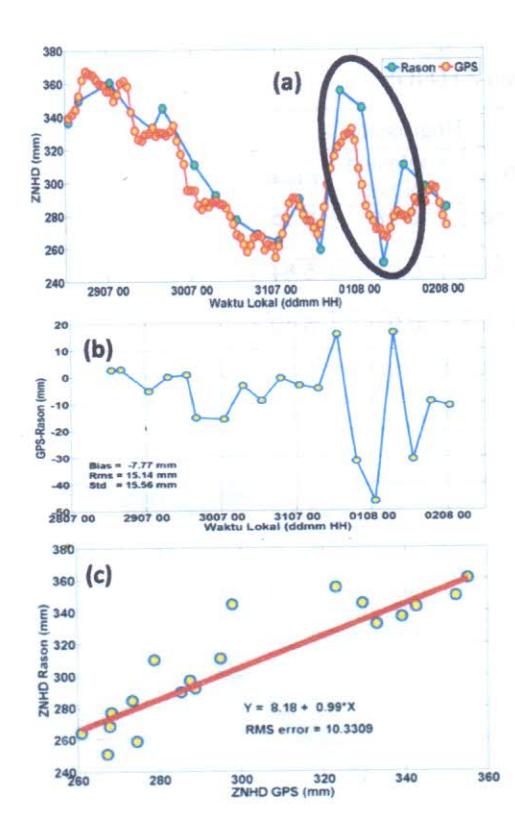
Gambar 3 ZNHD GPS dan ZNHD Radiosonde (a) Nilai ZNHD GPS dan Radiosonde; (b) Selisih ZNHD GPS – ZNHD Radiosonde; (c) Korelasi ZNHD GPS dan ZNHD Radiosonde.
3.3 Perbandingan ZNHD GPS dengan ZNHD Radiosonde Cengkareng
Hasil perbandingan ZNHD GPS dengan ZNHD radiosonde stasiun Cengkareng dapat dilihat pada Tabel 2. Dari Tabel 2 dapat dilihat bahwa ratarata bias antara ZNHD GPS dan ZNHD Radiosonde Cengkareng sebesar 2.2 cm dengan standar deviasi dan rms bernilai 2.9. Hal ini terjadi karena dipengaruhi oleh jarak stasiun GPS terhadap stasiun radiosonde Cengkareng, sehingga nilai bias ZNHD cukup besar (fraksi cm) karena ZNHD yang mengandung komponen uap air akan bervariasi secara spasial. Akan tetapi koefesien korelasi keduanya cukup bagus dengan rata-rata 0.81.
Tabel 2 Statistik ZNHD GPS dengan ZNHD Radiosonde Cengkareng
| sta. | Bias (cm) | std | rms | * | rho | Jarak (km) |
|---|---|---|---|---|---|---|
| bako | 1.8 | 2.4 | 2.4 | 2004 | 0.77 | 47.542 |
| cldo | 1.9 | 2.5 | 2.5 | 1792 | 0.79 | 75.386 |
| cpsr | 1.9 | 2.6 | 2.6 | 1750 | 0.76 | 91.262 |
| cptn | 2.2 | 2.9 | 2.9 | 1553 | 0.82 | 97.728 |
| ctvi | 2.1 | 2.8 | 2.8 | 1556 | 0.85 | 111.951 |
Tabel 3 (lanjutan) Statistik ZNHD GPS dengan ZNH Radiosonde Cengkareng.
| sta. | Bias (cm) | std | rms | # | rho | Jane (km) |
|---|---|---|---|---|---|---|
| tjis | 2.2 | 2.9 | 2.9 | 1741 | 0.8 | 115 HC |
| csbk | 2.1 | 2.7 | 2.7 | 1368 | 0.76 | 128.00 |
| csgt | 2.1 | 2.9 | 2.9 | 1191 | 0.85 | 129 ED |
| clbg | 1.7 | 2.3 | 2.3 | 1809 | 0.84 | 132.574 |
| cujg | 2.5 | 3.3 | 3.3 | .1461 | 0.84 | 143.23 |
| clgi | 2.2 | 2.9 | 2.9 | 1435 | 0.71 | 153.35 |
| cujk | 2.4 | 3.2 | 3.2 | 1785 | 0.87 | 173.810 |
| cpmk | 2.9 | 3.8 | 3.8 | 1463 | 0.86 | 205.95 |
| ctcn | 2.5 | 3.2 | 3.2 | 1338 | 0.76 | 214.016 |
| rata-rata | 2.2 | 2.9 | 2.9 | 0.81 |
Berikut ini contoh grafik hasil perbandingan ZNHD GPD dan ZNHD Radiosonde untuk stasiun bako de cpmk.
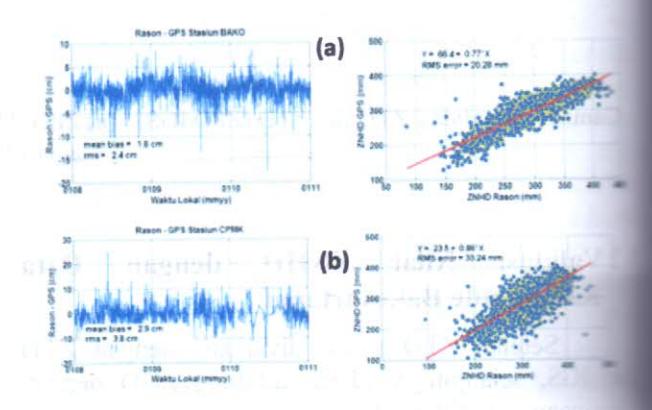
Gambar 4 Perbandingan ZNHD GPS dan ZNHD Radiosonde Cengkareng: (a) sta GPS bako; (b) sta. GPS cpmk.
3.4 Perbandingan ZNHD GPS dengan ZNHD NCEP
Hasil perbandingan ZNHD GPS dengan ZNHD NCEP dapat dilihat pada Tabel 4.
Tabel 4 statistik ZNHD GPS dan ZNHD NCEP
| sta. gps | bias (cm) | std | rms | rho | h_ortho (m) |
|---|---|---|---|---|---|
| bako | 2.1 | 2.7 | 2.7 | 0.62 | 141.4 |
| cldo | 3.3 | 4.1 | 4.1 | 0.08 | 663.3 |
| cpsr | 2.1 | 2.7 | 2.7 | 0.7 | 17.8 |
| cptn | 2.8 | 3.5 | 3.5 | 0.34 | 348.6 |
| ctvi | 3.7 | 4.5 | 4.5 | 0.03 | 824.6 |
| tjls | 2.2 | 2.9 | 2.9 | 0.67 | 4.8 |
ZNHD
Jarak (km) 116.982 128.826
129.822 132.874
153.351 173 812
205.959
n ZNHD
bako dan
ZNHD
D NCEP
Tabel 4 (lanjutan) statistik ZNHD GPS dan ZNHD NCEP
| sta. gps | bias (cm) | std | rms | rho | h_ortho (m) |
|---|---|---|---|---|---|
| csbk | 2 | 2.6 | 2.6 | 0.69 | 58.8 |
| csgt | 3.9 | 4.6 | 4.6 | 0.07 | 680.9 |
| clbg | 3.3 | 4.2 | 4.2 | 0.01 | 1307.9 |
| cujg | 2.6 | 3.3 | 3.3 | 0.61 | 6.4 |
| clgi | 2.2 | 2.8 | 2.8 | 0.51 | 248.8 |
| cujk | 2.5 | 3.2 | 3.2 | 0.61 | 30.9 |
| cpmk | 2.9 | 3.6 | 3.6 | 0.56 | 7.6 |
| ctcn | 2.3 | 3 | 3 | 0.65 | 22 |
| Rata-rata | 2.7 | 3.4 | 3.4 | ed l |
Dari Tabel 4 dapat dilihat bahwa rata-rata bias = 2.7 cm dengan standar deviasi dan rms bernilai 2.4 cm. Akan tetapi, koefesien korelasi (rho) untuk beberapa stasiun GPS (cldo, cptn, ctvi, csgt, clbg,) sangat rendah yaitu di bawah 0.5. Hal ini terjadi karena berkaitan dengan tinggi orthometrik stasiun GPS dengan level data dari NCEP. Data kelembaban relatif (RH) yang digunakan hanya sampai level pressure 300 hPa, sehingga untuk level pressure antara 300 - 0 hPa diinterpolasi dengan menggunakan persamaan hypsometric. Meskipun sudah diinterpolasi menggunakan persamaan hypsometric, akan tetapi nilai RH sangat kecil sehingga mengakibatkan nilai partial water vapor pressure yang digunakan untuk menghitung ZNHD sangat kecil. Akibat dari hal tersebut adalah nilai ZNHD yang kecil dan tidak menggambarkan keadaan yang sebenarnya. Berikut ini contoh grafik ZNHD GPS dengan ZNHD NCEP untuk stasiun GPS cpmk, bako, dan clbg, yang mewakili posisi stasiun GPS di dekat permukaan laut, pertengahan, dan gunung.
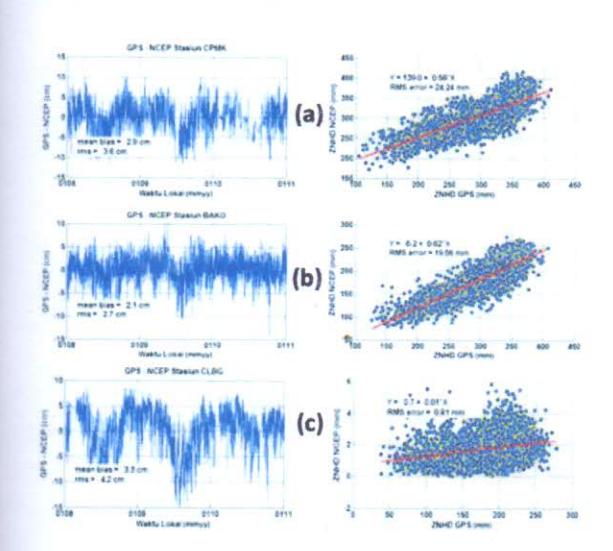
Gambar 5 Perbandingan ZNHD GPS dan ZNHD NCEP: (a) sta GPS cpmk; (b) sta GPS bako; (c) sta GPS clbg.
Dari pembahasan perbandingan ZNHD GPS dan ZNHD NCEP dapat disimpulkan bahwa data NCEP sangat baik untuk menghitung ZNHD @ wilayah yang mempunyai topografi dekat pantai atau rendah. Untuk topografi pegunungan penggunaan data NCEP untuk menentukan ZNHD akan memberikan hasil yang tidak bagus.
Kesimpulan
Dari pembahasan yang telah dilakukan dapat disimpulkan bahwa metode pengolahan data GPS yang digunakan sudah memberikan nilai ZTD yang cakan bagus, hal ini ditandai dengan hasil validasi nilai ZTD dengan ZPD (ZTD IGS) yang cukup bagus dengan nilai rata-rata bias = ~ 1.05 mm, rata-rata std dan ms = ~ 7.48 dan korelasi 0.97. Dari sini dapat disimpulkan bahwa metode pengolahan data GPS untuk penertuan ZTD dalam penelitian ini sudah valid [Susilo, 2012].
Pola ZNHD GPS dan ZNHD radiosonde umuk stasiun bako mempunyai kecenderungan yang sama. Hal ini ditandai dengan hasil validasi nilai ZNHD CPS stasiun bako dengan ZNHD radiosonde Bakosurtanal sudah memberikan hasil yang bagus, dengan nilai bias \(= \sim -7.77\) mm, std \(= \sim 15.56\) mm dengan rms \(= \sim 15.14\)dan korelasi = 0.99, sehingga dapat disimpulkan bahwa ZNHD GPS sudah valid setelah divalidasi dengan ZNHD radiosonde.
Perbandingan ZNHD GPS dengan ZNHD Radiosonde Cengkareng memberikan pola yang sama dengan rata-rata bias = ~ 2.2 cm dan rms = ~2.9 cm dengan koefesien korelasi 0.81. Jarak stasiun GPS dengan stasiun radiosonde Cengkareng merupakan faktor utama yang mempengaruhi nilai bias dan ms.
Perbandingan ZNHD GPS dengan ZNHD NCEP sangat dipengaruhi oleh kodisi topografi stasiun GPS, terutama tinggi orthometrik stasiun GPS. ZNHD NCEP akan berkorelasi tinggi dengan ZNHD stasiun GPS yang berada di topografi rendah (pantai) sedangkan untuk staiun GPS di topografi tinggi (pegunungan) korelasinya sangat rendah/jelek.
Dari hasil validasi ZNHD GPS dengan ZNHD radiosonde dan model atmosfer global dapat disimpulkan juga bahwa GPS merupakan suatu metode alternatif untuk keperluan monitoring atmosfer dengan ketelitian yang sebanding dengan metode konvensional (Radiosonde).
5 Ucapan Terima Kasih
Terima kasih penulis sampaikan kepada Dr. Cecep Subarya, MSurv.Sc. yang telah memberikan koordinat stasiun kontinu GPS yang teliti, dan masukan untuk pengolahan data GPS menggunakan GAMIT 10.4. Terima kasih juga penulis sampaikan kepada Bakosurtanal/BIG, dan Kemenristek atas kesempatan untuk melakukan penelitian ini, serta kepada NOAA/OAR/ESRL PSD, Boulder, Colorado, USA, atas penggunaan data model atmosfer global.
6 Daftar Pustaka
- Bar-sever, Y.E., Kroger, P.M., & Boerjesson, J.A., Estimating Horizontal Gradients of Tropospheric Path Delay with A Single GPS Receiver, J. Geophys. Res., 103(B3), 5019-5035, 1998.
- Bevis, M., Businger, S., Herring, T. A., Rocken, C., Anthes, R. A., Ware, R. H., GPS Meteorology: Remote Sensing of Atmospheric Water Vapor Using the Global Positioning System, Journal of Geophysical Research, vol. 97, no. d14, pages 15,787-15,801, 1992.
- Bevis, M., S. Businger, S. Chiswell, T. A. Herring, R. A. Anthes, C. Rocken, & R. H. Ware, GPS Meteorology: Mapping Zenith Wet Delays onto Precipitable Water, J. Appl. Meteor., 33, 379—386, 1994.
- Boehm, J., Tropospheric Delay Modelling at Radiowavelengths for Space Geodetic Techniques, Technical Report Heft Nr. 80, 2007, Institute of Geodesy and Geophysics, Vienna University of Technology, 2007.
- Foelsche, U., Tropospheric Water Vapor Imaging by Combination of Ground-Based and Spaceborne GNSS Sounding Data, Ph. D thesis, Institute for Meteorology and Geophysics, University Graz, Austria, 1999.
- Gabor, M. Remote Sensing of Water Vapor From GPS Receivers, ASE 389P Remote Sensing from Space, University of Texas at Austin, Spring 1997\nmid-term project; website: <a href="http://www.ae.utexas.edu/courses/ase389/midterm/gabor/gabor.html">http://www.ae.utexas.edu/courses/ase389/midterm/gabor/gabor.html</a>, 1997.
- Herring, T.A., Davis, J.L., and Shapiro, I., Geodesy by Radio Interferometry: The Application of Kalman Filtering to The Analysis of Very Long Baseline Interferometry Data, Geophys. Ress. Lett., 95 (B8), 12561-12581, 1990.
- Herring, T.A., Modeling Atmospheric Delays in The Analysis of Space Geodetic Data, in Symposium on Refraction of Transatmospheric Signals in Geodesy, Publ. Geod., edited by J.C. De Munk and T. A. Spoelstra, pp. 157-164, Netherlands Geodetic Comission, Delft, 1992.
- Hofmann-Wellenhof, B., Lichtenegger, H., and Collins, J., Global Positioning System: Theory and Practice, 5th edition. Australia: Springer-Verlag Wien New York, 2001.
- Karabatic, A., Precise Point Positioning (PPP) An Alternative Technique for Ground Based GNSS Troposphere Monitoring, Dissertation, Vienna
- University of Technology, Faculty of Mathematics and Geoinformation, Vienna Februari, 2011.
- King, R.W., Herring, T.A., McClusky, S.C., GAMII Reference Manual, Release 10.40, Department of Earth, Atmospheric, and Planetary Sciences, Massachusetts Institute of Technology, Oktober, 2010.
- MacMillan, D.S., Atmospheirc Gradients from Very Long Baseline Interferometry Observations, Geophys. Ress. Lett., 22(9), 1041-1044, 1995.
- Mockler, S. B., Water Vapor in the Climate System, Special Report, http://www.eso.org/gen-fac/pubs/astclim/espas/pwv/mockler.html#chapm an, 1995.
- Niell, A.E. Global Mapping Functions for The Atmospheric Delay at Radiowavelengths, J. Geophys. Res., 101, 3227-3246, 1996.
- Saastamoinen, J., Atmospheric Correction for The Troposphere and Stratosphere in Radio Ranging of Satellites, in The Use of Artificial Satellites for Geodesy, Geophys. Monogr. Ser., vol.15, edited by S.W. Henriksen, A. Mancini, and B.H. Chovitz, pp. 247-251, AGU, Washington D.C., 1972.
- Susilo, Pemantauan Precipitable Water Vapor (PWV) di Wilayah Jawa Barat Menggunakan GPS Kontinu, Tesis Magister Teknik Geodesi dan Geomatika, ITB, Bandung, 2012.
- Wijaya, D. D., Atmospheric Correction Formulae for Space Geodetic Techniques, PhD thesis, Engineering Geodesy, Graz University of Technology, Shaker-Verlag, 2010.
- Wijaya, D. D., & Fritz K. Brunner, Atmospheric Range Correction for Two-Frequency SLR Measurements, Journal of Geodesy, doi 10.1007/s00190-011-0469-8, 2011.