
1 Pendahuluan
Gempa bumi dengan magnitude besar yang berpusat di lepas pantai barat propinsi Nangroe Aceh Darussalam kemudian disusul dengan bencana tsunami dahsyat, telah menyadarkan banyak orang bahwa ternyata Indonesia; khususnya wilayah Sumatera; memiliki potensi bencana alam gempa bumi. Alasan dibalik mengapa Indonesia memiliki potensi tersebut ialah letak Indonesia yang merupakan pusat pertemuan dari lempeng-lempeng antara lain Eurasia, Filipina, Caroline, Indo-Australia, Pasifik, dan beberapa lempeng minor [Hamilton, 1979]. Terkait dengan lempeng Eurasia, lempeng Indo-Australia memiliki pergerakan rata-rata ke arah utara, sedangkan pergerakan lempeng Filipina cenderung ke arah barat laut [Hamilton, 1979 & Puspito, 1995 dalam USGS, 2011]. Terkait dengan lempeng Filipina, lempeng Caroline memiliki pergerakan ke arah tenggara di bagian palung Aru dan ke arah barat laut di bagian palung Yap [Seno, et.al, 1992 dalam USGS, 2011].
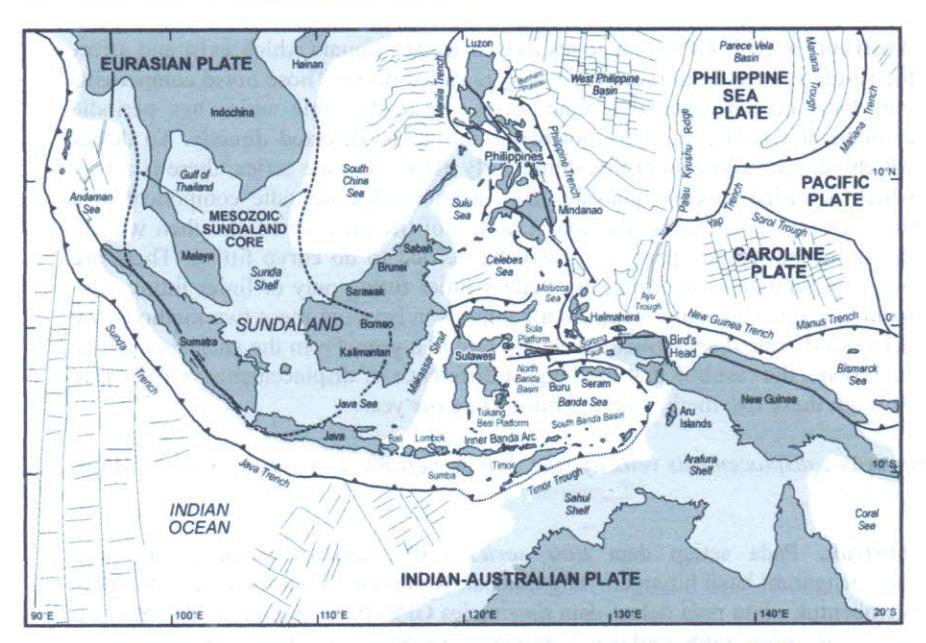
Gambar 1.1 Batas pertemuan lempeng di Indonesia [Hall, 2002].
Dengan kondisi tersebut, merupakan hal yang wajar jika Indonesia sering mengalami bencana gempa bumi yang diakibatkan aktifitas tektonik lempenglempeng yang mengelilinginya. Aktifitas tektonik sendiri merupakan teori baru yang dikemukakan oleh Alfred Lothar Wegener pada tahun 1912. Teori yang dikenal dengan Continental Drift (pergeseran benua) ini mengemukakan bahwa sekitar 200 tahun yang lalu, daratan yang sangat luas yang dinamakan Pangaea, mulai terpisah. Alexander Du Toit, seorang professor di bidang geologi dari Universitas Witwatersrand yang juga salah satu pendukung Wegener yang setia, mengemukakan bahwa Pangaea pertama kalinya pecah menjadi dua buah daratan yang sangat luas, yaitu Laurasia di belahan bumi bagian utara, dan Gondwanaland di belahan bumi bagian selatan [USGS, 2011].
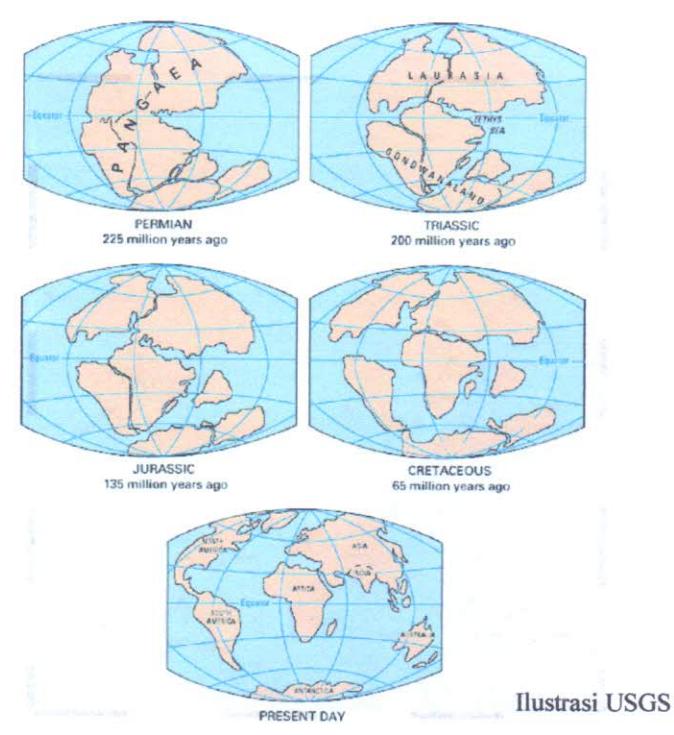
Gambar 1.2 Perkembangan Benua di Bumi Berdasarkan Teori Continental Drift.
Teori tektonik lempeng ini memiliki prinsip dasar yaitu bahwa bumi ditutupi oleh lapisan yang dingin dan tipis yang disebut litosfer. Lapisan ini mengambang di atas lapisan yang lebih padat dan memiliki suhu lebih hangat yang dapat mengalir, yang disebut mantel. Lapisan litosfer ini terpecah-pecah menjadi beberapa bagian yang disebut lempeng. Bebatuan yang berbentuk semiliquid yang berada di bawah mantel ini bergerak karena pengaruh dari panas yang berasal dari inti bumi dan mengakibatkan lempeng yang ada di atas mantel bergerak satu sama lain. Hal itulah yang menyebabkan fenomena alam seperti gempa bumi, gunung meletus, terbentuknya jajaran pegunungan, terbentuknya palung laut, dan sebagainya [Noyes, 2011].
Pantai barat Sumatera adalah salah satu daerah rawan gempa di Indonesia dikarenakan letaknya yang berdekatan dengan salah satu perbatasan lempeng aktif, yaitu antar lempeng Indo-Australia dengan lempeng Eurasia. Karena hal tersebut, Pulau Sumatera memiliki catatan gempa yang sangat panjang. Dalam kurun waktu 5 tahun saja, yaitu dari tahun 2004 hingga tahun 2008, sudah terjadi lebih dari 10 buah gempa bumi dengan magnitude rata-rata tinggi (5-9 MW) [USGS, 2008]. Dengan potensi tersebut, maka sejak tahun 2002, Geoteknologi LIPI bekerjasama dengan Tectonic Observatory Caltech sudah mengembangkan stasiun GPS kontinu yang dinamakan Sumatran GPS Array (SuGAr). Stasiun SuGAr ini tersebar memanjang di pantai barat Pulau Sumatera sehingga diharapkan setiap perubahan yang terjadi akibat pergerakan batas lempeng Indo-Australia dan Eurasia dapat teramati.
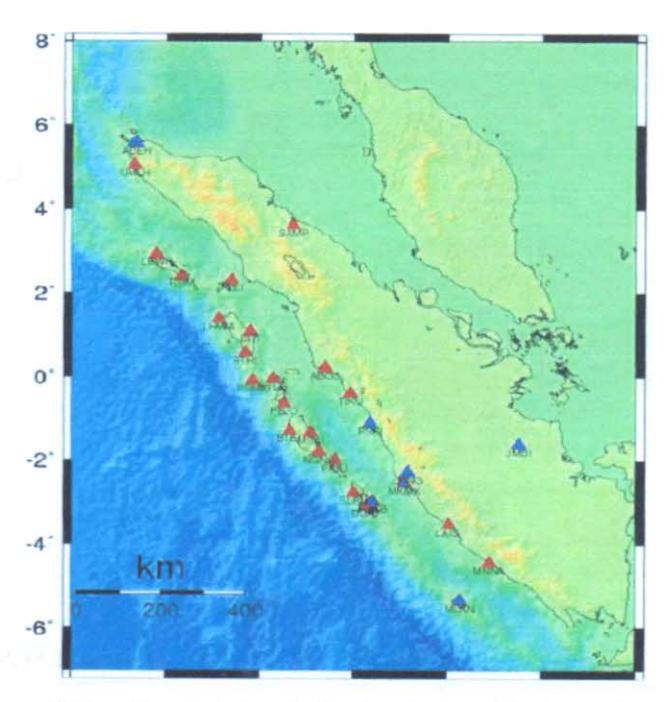
Gambar 1.3 Persebaran titik-titik Stasiun SuGAr [Rahman, 2011 dengan sedikit perubahan]
Dari data-data yang didapat dari pengukuran Stasiun GPS SuGAr ini kita dapat menghitung perubahan naik-turun dan juga pergerakan horizontal dari muka bumi dengan sangat akurat. Dari pengukuran ini kemudian kita juga dapat melakukan studi deformasi yang terjadi, antara lain mengenai siklus gempa bumi, atau kita juga dapat memodelkan dimensi dan kekuatan dari sumber gempa.
Dalam menganalisis data time series hasil pengamatan geodetik, kadang kala dapat dilakukan dengan mudah jika data tersebut tidak memiliki tren dan memiliki rasio noise-to-signal yang kecil. Tapi pada kenyataannya, hasil data pengamatan yang didapat seringkali memiliki rasio noise-to-signal yang tinggi, atau terdiri atas gabungan dari bermacam-macam jenis sinyal yang berbeda. Untuk itulah teknik analisis spektral dapat menyajikan hasil yang terbaik [Pytharouli, et.al, 2004].
2 Metodologi
2.1 Deret Waktu
Deret waktu (time series) merupakan sederetan pengamatan yang dihubungkan dengan ruang waktu [Box and Jenkins, 1970 dalam Wijaksana, 2009]. Jika suatu pengukuran dilakukan dalam suatu selang waktu tertentu, maka akan diperoleh data ukuran deret waktu yang diskrit (lead time - t). Deret waktu digunakan untuk menggambarkan sifat dari suatu variabel pada waktu yang lalu sebagai acuan untuk menentukan sifat variabel tersebut pada waktu tertentu, baik interpolasi maupun ekstrapolasi.
Secara klasik, deret waktu terbagi atas empat kategori [Wijaksana, 2009], yaitu :
a. Kecenderungan (trend atau long term movement) Kecenderungan merupakan gerak yang menunjukkan tren dari deret waktu yang biasanya dalam jangka yang lama dan menggambarkan sifat kekontinuitasan dari waktu ke waktu selama jangka waktu tersebut.
Sebagai contoh jika suatu data memiliki tren linier, maka model matematis dari plot data tersebut yaitu memenuhi persamaan :
\[y_{(t)} = ax + b\] ......[1]
dimana \(\mathbf{x}\) merupakan waktu pengamatan dan \(\mathbf{y}_{(t)}\) merupakan data pergerakan berdasarkan suatu deret waktu, adapun \(\mathbf{a}\) dan \(\mathbf{b}\) merupakan parameter yang nilainya ditentukan berdasarkan semua nilai data pengamatan. Gambar berikut adalah contoh data yaitu data time series GPS yang memiliki tren linier.
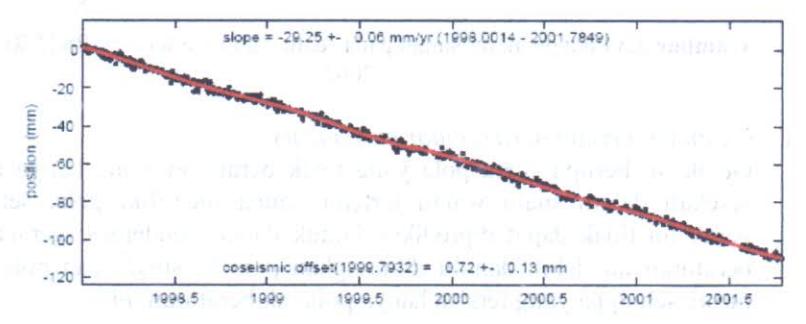
Gambar 2.1 Tren linier dalam suatu data pengamatan time series GPS [Nikolaidis, 2002].
Dalam pengamatan time series GPS, pola linier merupakan pola deformasi yang diamati. Akan tetapi, pola deformasi yang diperoleh dalam setiap pengamatan GPS tidak pernah lepas dari pengaruh pola musiman, pola naik-turun, dan pola tak beraturan.
b. Gerak naik-turun (cylical movement)
Gerak naik-turun merupakan pola yang disebabkan oleh beberapa faktor tertentu yang menyebabkan terdapatnya perubahan signifikan terhadap suatu tren data. Contohnya pada suatu data time series berikut, dimana pola naik-turun diakibatkan oleh adanya aktivitas koseismik di titik pengamatan tersebut, yaitu gempa bumi Nias pada bulan Maret 2005.
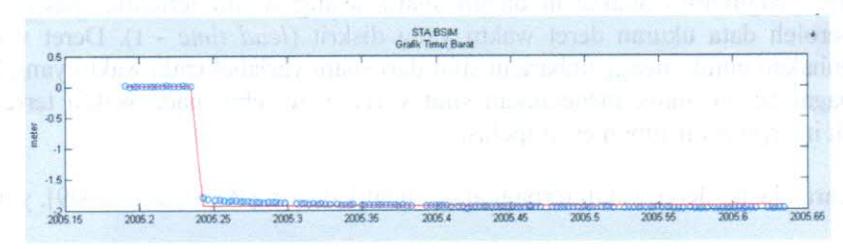
Gambar 2.2 Pola naik-turun dalam suatu data time series GPS.
c. Gerak musiman (seasonal variation)
Gerak musiman merupakan pola yang teratur dan relatif serupa yang bersifat periodik, yaitu gerakan yang memiliki periode berulang dalam selang waktu tertentu. Berikut adalah contoh dari pola gerak musiman.
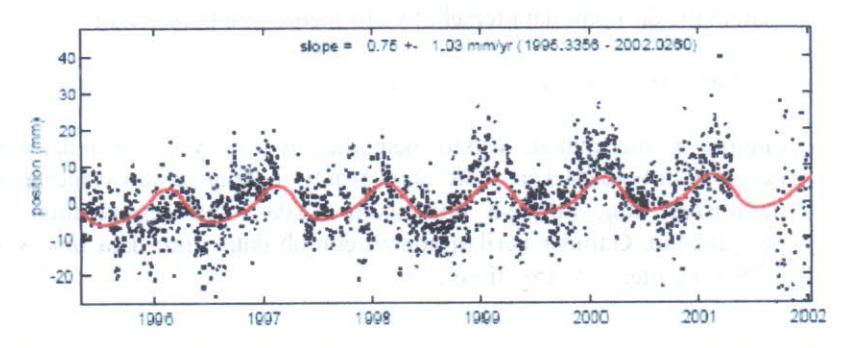
Gambar 2.3 Pola gerak musiman pada suatu data time series GPS [Nikolaidis, 2002].
d. Gerak tak beraturan (irregular movement)
Gerak ini berupa suatu pola yang tidak beraturan, yang hanya terjadi sesekali dalam suatu waktu tertentu tanpa memiliki pola, sehingga gerak ini tidak dapat diprediksi. Untuk dapat mendeteksi gerakan tak beraturan ini, lebih dahulu dihilangkan pola musiman dan pola naikturun, sehingga yang tersisa hanya pola tak beraturan ini.
Dalam pengamatan GPS, pola tak beraturan ini merupakan indikasi adanya data outlier atau data yang masih memiliki kesalahan besar. Data outlier ini merupakan data yang seharusnya tidak digunakan dalam suatu data pengamatan, sehingga keberadaannya harus dihilangkan. Berikut adalah contoh data time series GPS yang dipengaruhi oleh outlier.
Gambar 2.4 Pola tak beraturan dalam suatu data time series GPS [Casimin, 2009].
Untuk keperluan pengamatan deformasi pada suatu titik-titik pengamatan, diperlukan data deret waktu yang terjadi pada titik-titik pengamatan tersebut dalam suatu kurun waktu tertentu. Pada awalnya, data pengamatan yang diperoleh dari pengukuran GPS adalah data koordinat posisi titik pengamatan dalam sistem koordinat geosentrik. Data posisi tersebut kemudian ditransformasi ke dalam sistem koordinat toposentrik.
Gambar 2.5 Hübungan antara sistem koordinat geosentrik dengan sistem koordinat toposentrik [Kosasih & Wedyanto, 2005].
Pada Gambar 2.5 tersebut, titik yang menjadi objek pengukuran adalah titik P dan titik Q. Kedua titik P dan Q ini masing-masing telah diketahui koordinat geosentriknya dari hasil pengukuran GPS. Dengan menjadikan titik Q menjadi pusat koordinat untuk sistem koordinat toposentrik, maka akan diperoleh koordinat toposentrik dari titik P, maka selanjutnya dilakukan proses transformasi koordinat dengan menggunakan persamaan sebagai berikut [Kosasih & Wedyanto, 2005]:
\[\begin{pmatrix} np \\ ep \\ up \end{pmatrix} = \mathbf{R} \left( \varphi_{Q}, \lambda_{Q} \right) \begin{pmatrix} \Delta x \\ \Delta y \\ \Delta z \end{pmatrix} \text{ dengan } \begin{pmatrix} \Delta x \\ \Delta y \\ \Delta z \end{pmatrix} = \begin{pmatrix} xP - xQ \\ yP - yQ \\ zP - zQ \end{pmatrix}\]
Adapun
\[\mathbf{R}(\varphi_{Q},\lambda_{Q}) = \begin{pmatrix} -\sin(\varphi Q)\cos(\lambda Q) & -\sin(\varphi Q)\sin(\lambda Q) & \cos(\varphi Q) \\ -\sin(\lambda Q) & \cos(\lambda Q) & 0 \\ \cos(\varphi Q)\cos(\lambda Q) & \cos(\varphi Q)\sin(\lambda Q) & \sin(\varphi Q) \end{pmatrix}\]
Keterangan:
np, ep, up = koordinat toposentrik
\(\varphi_{Q}, \lambda_{Q}\) = lintang geodetik dan bujur geodetik dari titik Q
\(x_Q, y_Q, z_Q\) = koordinat titik ikat (geosentrik)
\(x_p, y_p, z_p = \text{koordinat titik pantau (geosentrik)}\)
\(\Delta x\), \(\Delta y\), \(\Delta z\) = selisih antara koordinat titik pantau dan titik ikat
R = matriks rotasi
Dalam membuat suatu data deret waktu untuk tiap stasiun, maka dalam proses perhitungan koordinat toposentrik ini yang menjadi titik pusat koordinat adalah yaitu koordinat titik pada kala (n), dan untuk data koordinat selanjutnya yaitu koordinat titik pada kala (n+i) untuk "i" yaitu day of year (DOY) pengamatan, sehingga koordinat toposentrik untuk tiap-tiap titik pngamatan dalam kala waktu tertentu adalah:
\[\begin{pmatrix} dn \\ de \\ du \end{pmatrix} = \begin{pmatrix} nT(n+i) \\ eT(n+i) \\ uT(n+i) \end{pmatrix} - \begin{pmatrix} nT(n) \\ eT(n) \\ uT(n) \end{pmatrix}\]
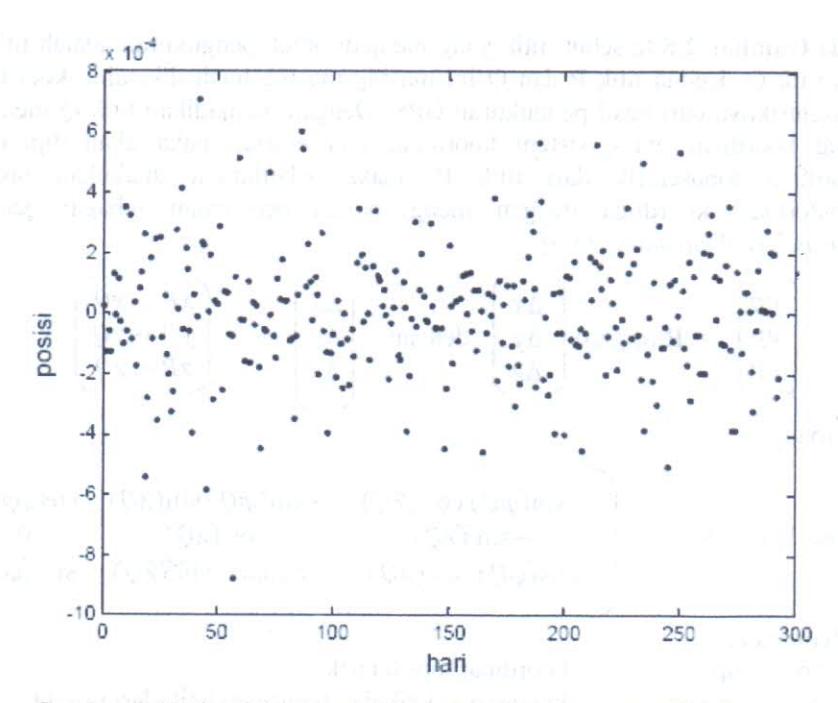
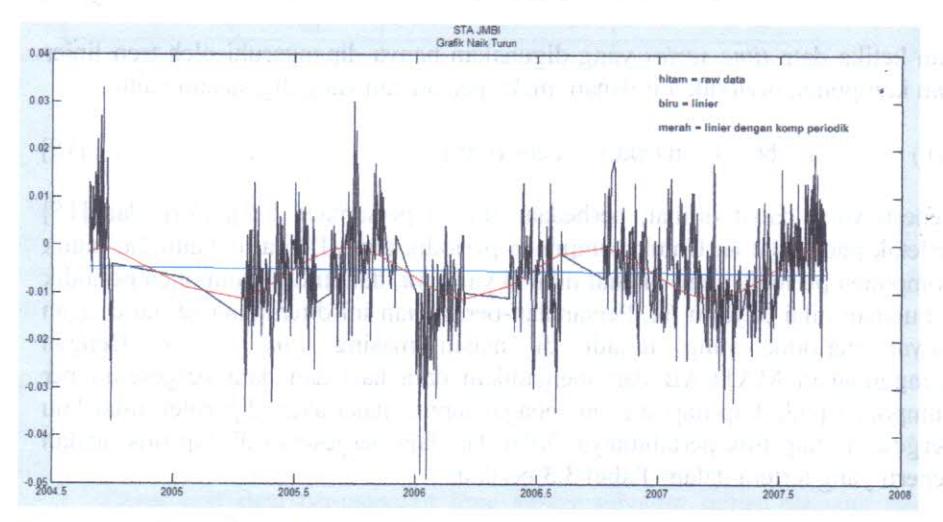
Maka setelah perhitungan koordinat toposentrik dilakukan, maka dapat diperoleh koordinat toposentrik masing-masing stasiun untuk setiap DOY. Hasil dari koordinat tersebut dapat diplot dengan bantuan software MATLAB seperti pada Gambar 2.6 berikut.
Gambar 2.6 Hasil plot dari koordinat toposentrik stasiun JMBI per-DOY.
Proses selanjutnya adalah melakukan fitting linier terhadap data mentah dari koordinat toposentrik masing-masing stasiun. Dari fitting linier tersebut, maka dihitung residu pengukuran dengan rumus:
Dari data residu tersebut, kemudian dilakukan penghitungan terhadap standar deviasi. Rumus yang digunakan dalam menghitung standar deviasi adalah sebagai berikut.
\[\sigma = \left[\sum (x_i - \mu)^2\right]^{1/2} / (N-1)...\][3] dengan:
σ = standar deviasi
\(x_i = data ke-i\)
μ = mean (rata-rata) sampel
N-1 = jumlah sampel
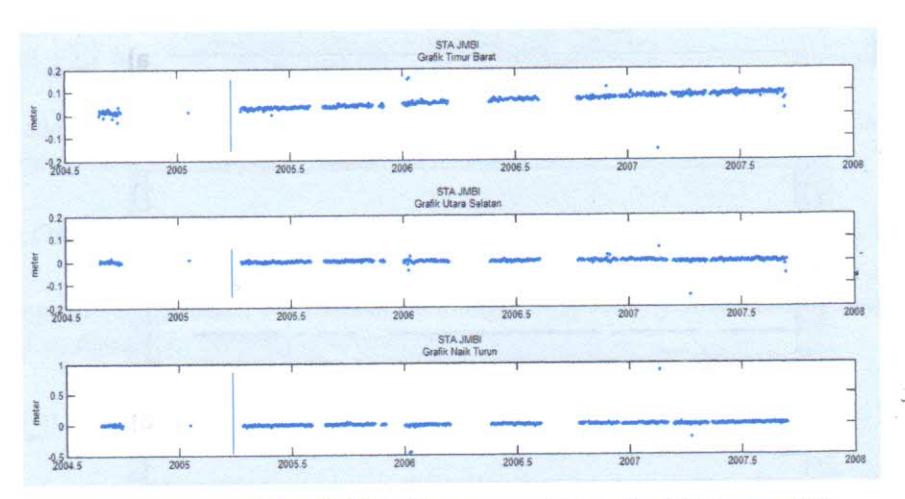
Data yang tidak digunakan adalah data yang nilai residunya lebih dari 3 kali standar deviasi yang dianggap sebagai outlier. Setelah data outlier tersebut direduksi, barulah kita dapatkan data yang telah bersih. Sebagai contoh, berikut adalah gambar dari stasiun PSKI pada saat outlier belum direduksi dan setelah outlier direduksi.
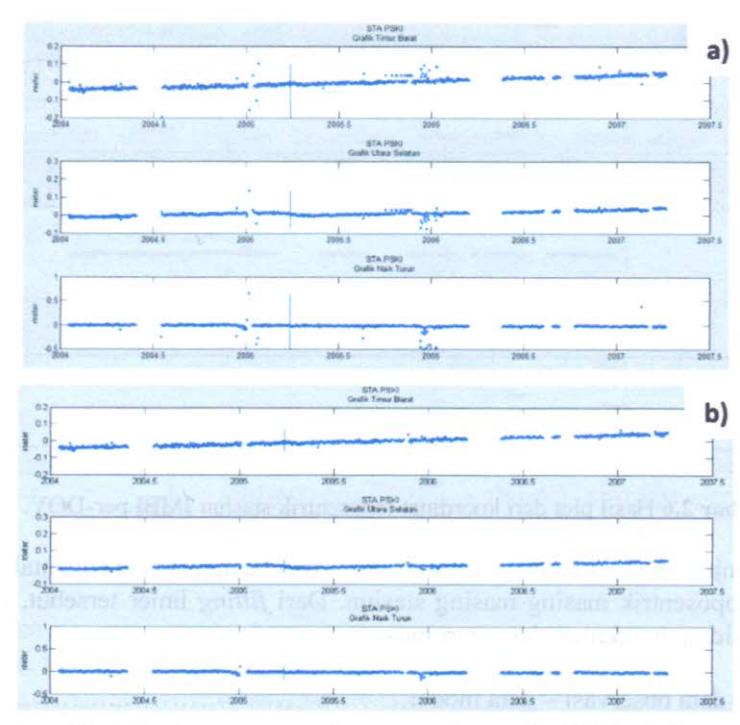
Gambar 2.7 Perbandingan antara data time series stasiun PSKI sebelum oulier dihilangkan (a) dan sesudah outlier dihilangkan (b).
2.2 Analisis Spektral dengan Metode Normalisasi Periodogram
Sebuah data time series yang dianalisis secara detail dapat menguak informasi penting dengan lebih jauh lagi. Analisis mengenai karakteristik noise dan sinyal musiman dalam suatu time series membuat kita dapat mengetahui lebih dalam mengenai suatu proses dalam suatu jaring GPS, bahkan mengenai lingkungan sekitar suatu stasiun dipasang. Hal ini memungkinkan kita untuk memperoleh estimasi dari ketelitian kecepatan dan memperoleh informasi tentang kestabilan monumen GPS [Kenyeres, 2006].
Analisis dengan metode Periodogram Lomb dimaksudkan untuk mendeteksi adanya periodesitas dalam data pengamatan. Metode ini secara umum merupakan suatu cara yang ampuh dalam mendeteksi dan menguji signifikansi dari sinyal periodik yang pada dasarnya sulit dideteksi [Press, 1989]. Metode periodogram yang dikembangkan oleh Lomb (1976) dan Scargle (1982) merupakan pengembangan dari dari analisis tipe periodogram yang lain yaitu spektrum Fourier. Dasarnya adalah jika kita memiliki suatu set data yang bernilai \(h_i\), dengan i = 1,..., N dengan waktu pengamatan masing-masing data yaitu \(t_i\), maka periodogramnya dibentuk dengan tahapan-tahapan sebagai berikut [Press, 1989]:
Pertama-tama yaitu menghitung rata-rata dan variansi dari set data dengan persamaan:
\[\bar{h} \equiv \frac{1}{N} \sum_{i=1}^{N} h_i\], \(\sigma^2 \equiv \frac{1}{N-1} \sum_{i=1}^{N} (h_i - \bar{h})^2\)....[4]
Kedua, untuk tiap frekuensi angular yang memenuhi syarat \(\omega \equiv 2\pi f > 0\), maka hitung time-offset \(\tau\) dengan persamaan :
\[\tan (2\omega\tau) = \frac{\sum_{i} \sin 2\omega t_{i}}{\sum_{i} \cos 2\omega t_{i}} ...................................\]
Langkah ketiga adalah normalisasi periodogram (\(spectral\ power\ sebagai\ fungsi dari\ \omega\), dijelaskan dengan persamaan :
\[P_{N}(\omega) = \frac{1}{2\sigma^{2}} \left\{ \frac{\left[\sum_{i} (h_{i} - \overline{h}) \cos \omega(t_{i} - \tau)\right]^{2}}{\sum_{i} \cos^{2} \omega(t_{i} - \tau)} + \frac{\left[\sum_{i} (h_{i} - \overline{h}) \sin \omega(t_{i} - \tau)\right]^{2}}{\sum_{i} \sin^{2} \omega(t_{i} - \tau)} \right\} \dots [6]\]
Nilai \(\tau\) yang konstan membuat nilai \(P_N(\omega)\) benar-benar independen, tidak dipengaruhi oleh perubahan dari \(t_i\) dengan nilai konstata berapa pun. Lomb (1976) menujukkan bahwa keputusan untuk memilih offset metode ini memiliki efek lain yang lebih penting; yaitu membuat persamaan [8] identik dengan persamaan dalam mengestimasi komponen harmonik dalam suatu data set, pada frekuensi \(\omega\), dengan menerapkan fitting linier kuadrat terkecil terhadap model pada persamaan berikut,
\[h(t) = A \cos \omega t + B \sin \omega t \dots [7]\]
maka dari itu, metode ini cocok diterapkan pada data yang tidak tersebar merata karena metode ini menekankan akan data per titik, bukan data per selang waktu.
2.3 Metode Menghitung Laju Pergeseran di Setiap Titik
Persamaan pengamatan untuk pergerakan yang terjadi pada tiap titik yaitu [Nikolaidis, 2002]:
\[y(t_i) = a + bt_i + c\sin(2\pi t_i) + d\cos(2\pi t_i) + e\sin(4\pi t_i) + f\cos(4\pi t_i) + \sum_{j=1}^{n_g} g_j H(t_i - T_{gj}) + v_i\] ......[8]
Keterangan:
\(y(t_i)\) = pergeseran titik pada \(t_i\), t<sub>i</sub> = data epok untuk i = 1,..., n dalam satuan tahun, a = koordinat awal stasiun GPS, b = laju pergeseran dalam satuan meter/tahun, c dan d = koefisien dari pergerakan yang bersifat periodik tahunan, e dan f = koefisien dari pergerakan yang bersifat periodik semi-tahunan,
H = fungsi Heaviside.
g = besar magnitudes,
Tg = epok.
Jika diasumsikan offset dari epok diketahui, maka model persamaan liniernya memiliki koefisien sebagai berikut
\[x = [abcdefg]^T\].....[9] maka,
\[y = Ax\] .....[10]
dimana A merupakan matriks desain yang berasal dari turunan parsial. Adapun untuk menghitung parameter yang tidak diketahui adalah :
\[x = A^{-1} y\] ......[11]
Untuk mencegah hasil perhitungan yang error akibat dari kondisi matriks A yang tidak simetris, maka matriks A dikalikan dengan matriks transpose-nya, sehingga dihasilkan matriks A yang simetris. Jika matriks A dikalikan dengan matriks A transpose, maka matriks y pun harus dikalikan dengan faktor pengali yang sama, sehingga persamaannya menjadi,
\[x = [A^{T}A]^{-1} A^{T}y\] .....[12]
3 Hasil dan Analisis
3.1 Analisis Komponen Periodik pada Setiap Data Time Series per Stasiun
Analisis untuk mendeteksi periodisitas suatu data time series dilakukan dengan menerapkan metode Periodogram Lomb yang merupakan teknik yang digunakan untuk data-data yang bersifat unequally spaced atau tidak tersebar secara merata.
Pada kali ini, metode Periodogram Lomb digunakan untuk mendeteksi komponen periodik yang mempengaruhi data time series dari 8 buah stasiun GPS SuGAr, yaitu stasiun ACEH, BAKO, JMBI, LNNG, MKMK, MSAI, PRKB, dan PSKI, dalam selang waktu tahun 2004 - 2007. Teknik ini diterapkan pada data time series yang masih mengandung outlier dan pada data yang telah bebas outlier dengan outlier dihitung dengan menggunakan persamaan [3]. Pada Tabel 3.1 berikut adalah perbandingan nilai rms dari data yang masih mengandung outlier dengan data yang outlier-nya telah direduksi.
Tabel 3.1 Daftar perbandingan nilai rms antara data yang mengandung outlier dengan data yang telah bebas outlier.
| Stasiun GPS | Komponen | Time Series | RMS (mm) |
|---|---|---|---|
| ACEH | timur barat | raw | 437.097 |
| cleaned | 271.2924 | ||
| utara selatan | raw | 177.704 | |
| cleaned | 123.591 | ||
| naik turun | raw | 640.463 | |
| cleaned | 456.229 | ||
| BAKO | timur barat | raw | 14.741 |
| cleaned | 7.07 | ||
| utara selatan | raw | 11.149 | |
| cleaned | 5.416 | ||
| naik turun | raw | 41.459 | |
| cleaned | 16.779 | ||
| JMBI | timur barat | raw | 12.7 |
| cleaned | 5.132 | ||
| utara selatan | raw | 7.947 | |
| cleaned | 3.757 | ||
| naik turun | raw | 44.97 | |
| cleaned | 10.172 | ||
| LNNG | timur barat | raw | 34.603 |
| cleaned | 9.676 | ||
| utara selatan | raw | 48.082 | |
| cleaned | 8.558 | ||
| naik turun | raw | 49.304 | |
| cleaned | 14.428 | ||
| MKMK | timur barat | raw | 17.327 |
| cleaned | 6.286 | ||
| utara selatan | raw | 10.365 | |
| cleaned | 4.217 | ||
| naik turun | raw | 54.695 | |
| cleaned | 17.656 | ||
| MSAI | timur barat | raw | 7.212 |
| cleaned | 4.494 | ||
| utara selatan | raw | 5.451 | |
| cleaned | 3.446 | ||
| naik turun | raw | 34.551 | |
| cleaned | 11.606 | ||
| PRKB | timur barat | raw | 34.089 |
| cleaned | 6.85 | ||
| utara selatan | raw | 5.55 | |
| cleaned | 4.243 | ||
| naik turun | raw | 37.409 | |
| mer market by | cleaned | 15.105 | |
| PSKI | timur barat | raw | 10.718 |
| . 5.0 | United Builds | cleaned | 5.391 |
| Carta X Note: | utara selatan | raw | 8.333 |
| atara selatan | cleaned | 5.055 | |
| naik turun | raw | 54.33 | |
| o India da da | cleaned | 17.46 |
Dari data rms di atas dapat disimpulkan bahwa stasiun ACEH memiliki rms yang paling besar. Hal ini dapat diakibatkan akibat ketidak-kontinuitasan datanya yang sangat tinggi atau rendahnya rasio signal-to-noise yang terjadi tiap harinya.
Adapun gambar berikut memperlihatkan perbandingan rms antara data time series sebelum dan sesudah outlier dibuang.
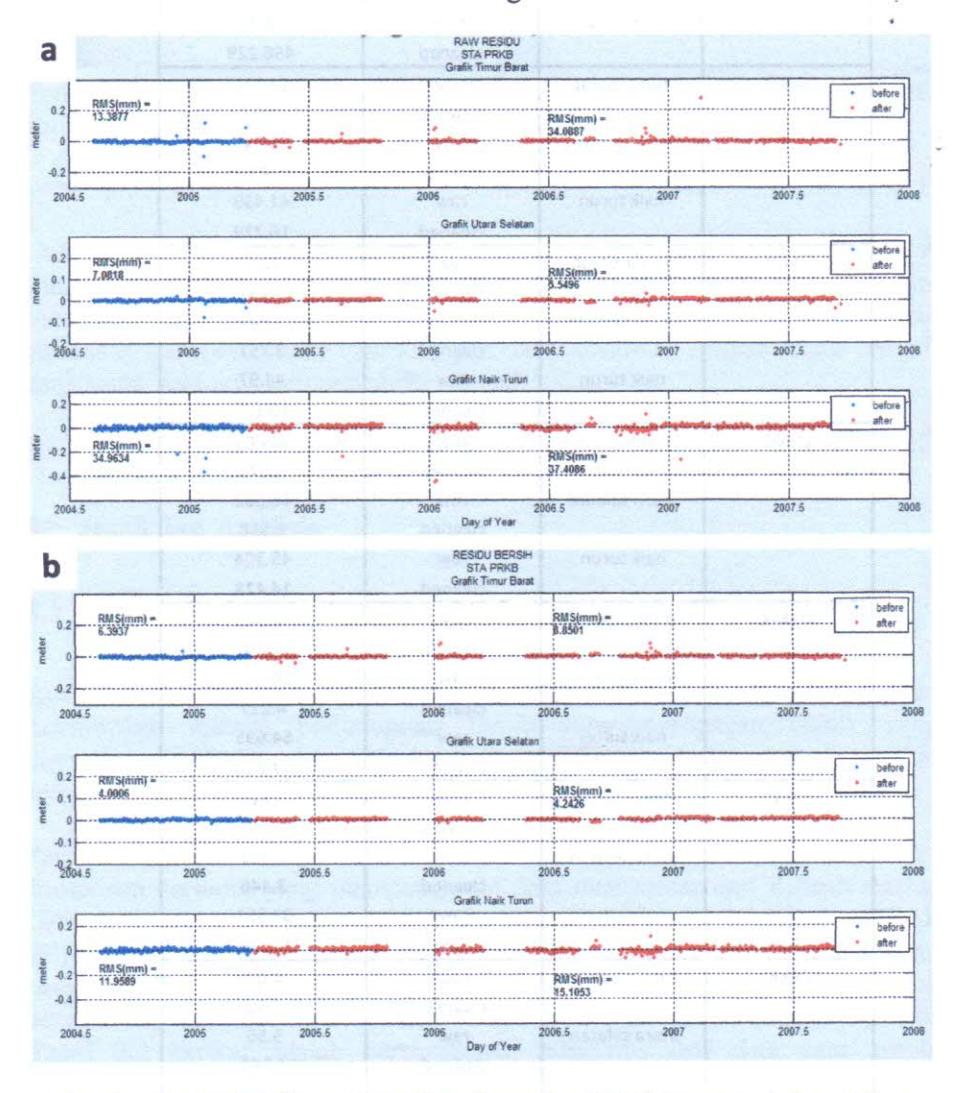
Gambar 3.1 Perbandingan Root Mean Square (rms) dari data time series sebelum outlier dibuang (a) dan sesudah outlier dibuang (b).
Sebagai contoh yang ditampilkan sebelumnya yaitu data time series stasiun PRKB.
Selanjutnya, tahap analisis periodesitas dilakukan terhadap data yang telah bebas dari outlier. Analisis ini dilakukan dengan tujuan untuk mendeteksi sinyal
periodesitas annual dan/atau semi-annual pada suatu data time series. Periodesitas ini dideteksi dengan menggunakan software MATLAB. Dengan menjadikan data hari dan data pergeseran per harinya sebagai input, maka hasilnya adalah sebagai berikut.
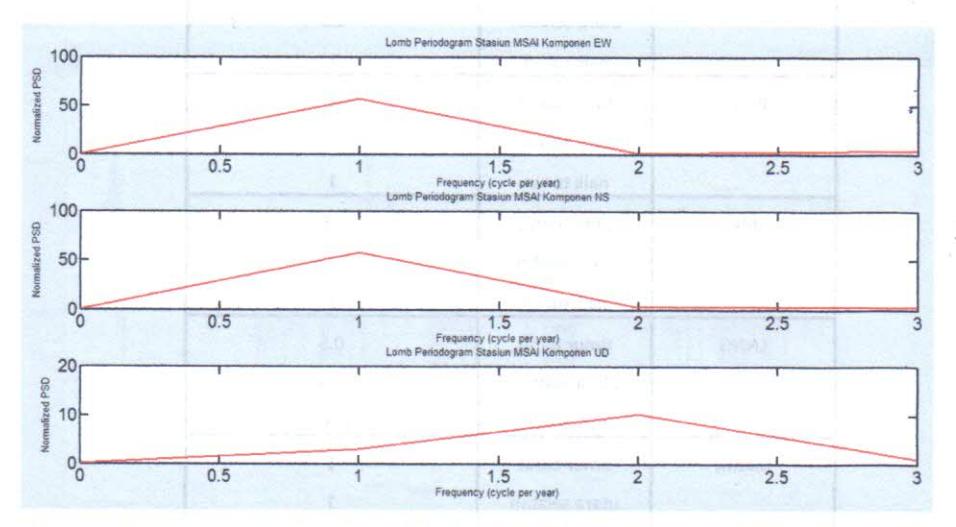
Gambar 3.2 Periodogram Lomb dari Stasiun MSAI untuk komponen EW, NS, dan UD.
Dari Periodogram Lomb pada Gambar 3.2, dapat dilihat bahwa data time series stasiun MSAI memiliki komponen sinyal periodik yang ditandai dengan adanya nilai frekuensi yang dominan. Pada komponen EW (East West – Timur Barat), dapat dilihat bahwa untuk frekuensi dengan nilai 1 cycle per year (cpy) memiliki nilai yang paling tinggi, artinya dalam komponen tersebut terdapat sinyal periodik yang mengalami perulangan sebanyak satu kali dalam satu tahun atau periodesitasnya yaitu satu tahun (annual). Begitu pula yang terjadi pada komponen NS (North South – Utara Selatan), terdapat sinyal periodik yang mengalami perulangan sebanyak satu kali dalam setahun. Lain halnya dengan yang terjadi dalam komponen UD (Up Down – Naik Turun), dimana nilai frekuensi yang dominan yaitu bernilai 2 cpy, yang artinya sinyal periodik yang terjadi mengalami perulangan yaitu dua kali dalam satu tahun, atau periodesitasnya yaitu setengah tahun (semi-annual). Berikut pada Tabel 3.2 memuat periodesitas dari semua stasiun pengamatan lainnya.
Tabel 3.2 Periodesitas Tiap-tiap stasiun GPS
| itasiun GPS | Komponen | Periodesitas (tahun) |
|---|---|---|
| ACEH | timur barat | 0.5 |
| utara selatan | 0.5 | |
| naik turun | 1 | |
| BAKO | timur barat | 1 |
| utara selatan | 1 | |
| naik turun | 1 | |
| JMBI | timur barat | 0.5 |
| utara selatan | 1 | |
| naik turun | 1 | |
| LNNG | timur barat | 0.5 |
| utara selatan | 0.5 | |
| naik turun | 0.33 | |
| MKMK | timur barat | 1 |
| utara selatan | 1 | |
| a Charles | naik turun | 0.33 |
| MSAI | timur barat | 1 |
| utara selatan | 1 | |
| naik turun | 0.5 | |
| PRKB | timur barat | Decide to 1 July 1 |
| utara selatan | 0.5 | |
| Marie | naik turun | 0.5 |
| PSKI | timur barat | null 1 |
| utara selatan | 1276 July 1 | |
| naik turun | 0.5 |
Dari hasil yang dapat dilihat pada Tabel 3.2, pada umumnya komponen annual dan komponen semi-annual terjadi pada setiap stasiun. Sebanyak 7 buah stasiun memiliki komponen annual dan komponen semi-annual untuk setiap komponen yang berbeda, adapun pada stasiun LNNG dan MKMK komponen naik turun memiliki sinyal periodik dengan perulangan 4 bulan. Faktor utama yang menyebabkan terjadinya variasi nilai periodesitas pada tiap-tiap data time series adalah diantaranya faktor stimulasi gravitasi, efek udara panas, dinamika hidrologi, dan sebagainya [Xu, et.al, 2009]. Sedangkan untuk komponen annual, biasanya muncul akibat faktor-faktor yang di antaranya karena kesalahan pada parameter troposfer dan pengaruh perubahan massa atmosfer yang diakibatkan oleh tutupan salju, tekstur tanah, dan massa air laut [Poutanen , et.al, 2001].
3.2 Analisis Laju Pergeseran per Tahun
Analisis ini dilakukan untuk membandingkan perbedaan laju pergeseran suatu titik per tahunnya ketika suatu data time series dipengaruhi sinyal periodik dan ketika tidak dipengaruhi sinyal periodik.
Gambar 3.3 Sinyal yang dipengaruhi komponen periodik adalah sinyal yang berwarna merah sedangkan sinyal yang tidak dipengaruhi komponen periodik adalah sinyal yang berwarna biru.
Untuk menghitung laju pergeseran tiap titik pertahunnya dapat dilakukan dengan menerapkan persamaan berikut [Nikolaidis, 2002]:
\[y(t_i) = a + bt_i + c\sin(2\pi t_i) + d\cos(2\pi t_i) + e\sin(4\pi t_i) + f\cos(4\pi t_i) + \sum_{j=1}^{n_g} g_j H(t_i - T_{gj}) + v_i\]
Persamaan tersebut digunakan karena memuat seluruh parameter untuk komponen-komponen yang mungkin terjadi dalam suatu data time series, antara lain komponen linier (a dan b), komponen periodik (c, d, e dan f), serta Heaviside (g). Dengan menerapkan persamaan tersebut, akan diperoleh laju pergeseran tiap titik, baik ketika tidak dipengaruhi komponen periodik maupun ketika data dipengaruhi sinyal periodik. Ketika data time series yang digunakan hanya dipengaruhi oleh tren linier dan komponen periodik annual, maka persamaan yang digunakan yaitu:
\[y(t_i) = a + bt_i + c \sin(2\pi t_i) + d \cos(2\pi t_i)\] [13] dengan:
a = posisi titik, b = laju pergeseran linier, c dan d = parameter komponen periodik,
\(t_i\) = epok pengamatan dalam satuan hari dengan i = 1,...,N.
Sedangkan ketika data time series yang digunakan hanya dipengaruhi oleh tren linier dan komponen periodik semi-annual, maka persamaan yang digunakan yaitu:
\[y(t_i) = a + bt_i + c \sin(4\pi t_i) + d \cos(4\pi t_i)\]....[14] dan ketika data time series yang digunakan hanya dipengaruhi oleh tren linier dan komponen periodik 4 bulanan, maka persamaan yang digunakan yaitu:
\[y(t_i) = a + bt_i + c \sin(6\pi t_i) + d \cos(6\pi t_i)\]....[15]
Seperti yang dapat dilihat, perbedaan antara persamaan [13], [14], dan [15] terletak pada nilai \(\omega\). Untuk komponen periodik annual, nilai \(\omega\) yaitu \(2\pi\), untuk komponen periodik semi-annual nilai \(\omega\) yaitu \(4\pi\), dan untuk komponen periodik 4 bulanan nilai \(\omega\) yaitu \(6\pi\). Persamaan-persamaan ini diterapkan sesuai dengan sinyal periodik yang terjadi di masing-masing time series. Dengan menggunakan MATLAB dan menjadikan data hari dan data pergeseran per komponen pada tiap-tiap stasiun sebagai input, maka akan diperoleh nilai laju pergeseran tiap titik pertahunnya. Nilai dari laju pergeseran di tiap titik adalah seperti yang tertera dalam Tabel 3.3 berikut.
Tabel 3.3 Perbandingan laju pergeseran per komponen di tiap titik antara kurva linier dengan kurva yang memiliki komponen periodik
| Nama Stasiun | Komponen | Kec/Tahun (Linier) | Kec/Tahun (Periodik) |
|---|---|---|---|
| (mm/tahun) | (mm/tahun) | ||
| ACEH | ew | -146.118 | -145.282 |
| ns | -113.518 | -109.898 | |
| ud | 129.758 | 133.432 | |
| ВАКО | ew | 26.822 | 26.754 |
| ns | -6.048 | -5.965 | |
| ud | -18.921 | -19.073 | |
| JMBI | ew | 27.613 | 27.464 |
| ns | -1.136 | -0.945 | |
| 1/5 | ud | -0.457 | 0.363 |
| LNNG | ew | 31.733 | 31.636 |
| ns | 17.408 | 17.287 | |
| ud | -3.548 | -3.572 | |
| МКМК | ew | 34.046 | 33.919 |
| ns | 19.218 | 19.398 | |
| ud | -2.576 | -2.557 | |
| MSAI * | ew | 52.409 | 53.745 |
| ns | 24.889 | 23.453 | |
| ud | -13.386 | -12.751 |
dengan kurva yang memiliki komponen periodik (lanjutan)
Tabel 3.3 Perbandingan laju pergeseran per komponen di tiap titik antara kurva linier
| PRKB | ew | 38.795 | 38.65 | |
|---|---|---|---|---|
| el accommo | ns | 34.75 | 34.639 | |
| I Yand son | ud | -6.97 | -6.76 | |
| PSKI | ew | 28.24 | 28.32 | 11 |
| ns | 12.88 | 12.493 | ||
| ud | -5.928 | -5.393 |
Dari Tabel 3.3 diperoleh bahwa perbedaan laju pergeseran per tahun yang. terjadi di tiap stasiun antara kurva linier dan kurva dengan komponen periodik berkisar antara 0.1 mm/tahun hingga 4 mm/tahun dengan perbedaan terbesar terjadi di stasiun ACEH komponen UD, yaitu sebesar 3.7 mm/tahun.
Kesimpulan
Berdasarkan hasil analisis, maka dari penelitian yang telah dilakukan dapat ditarik kesimpulan yaitu antara lain:
- 1. Level rms data pengamatan time series sebelum oulier dibuang dan sesudah outlier dibuang berkurang menjadi lebih kecil. Dari 8 buah stasiun yang menjadi sasaran penelitian, data pengamatan stasiun ACEH memiliki pengurangan nilai rms yang paling besar. Untuk komponen timur-barat, nilai rms-nya berkurang hingga 16.6 cm, sedangkan untuk komponen utara-selatan berkurang hingga 5.4 cm. Adapun pada komponen naik-turun, rms-nya berkurang 18.4 cm. Untuk stasiun selain ACEH, perubahan nilai rms-nya yaitu berkisar antara 1-
- 2. Dengan menggunakan metode Periodogram Lomb, dapat dideteksi bahwa dalam seluruh data time series yang menjadi studi kasus dalam kajian ini terdapat komponen periodik yang mempengaruhi sinyal deformasi yang ada pada tiap-tiap data pengamatan. Komponen periodik tersebut antara lain yaitu komponen annual, yaitu komponen yang mengalai perulangan sebanyak 1 kali dalam setahun, ditandai dengan nilai periodesitas 1; komponen semi-annual yaitu komponen yang mengalami perulangan sebanyak 2 kali dalam setahun, yang ditandai dengan nilai periodesitas 0.5; dan terakhir komponen 4 bulanan yaitu komponen yang mengalami perulangan sebanyak 3 kali dalam setahun, yang ditandai dengan nilai periodesitas 0.33.
- 3. Terdapat perbedaan besarnya laju pergeseran per tahun antara data yang menggunakan fitting linier dengan data yang memiliki komponen periodik. Perbedaan yang paling besar terjadi pada stasiun ACEH komponen naik-turun dengan nilai sebesar 3.7 mm/tahun.